


轮式遥控机器人现已使用在地震、火灾等一些风险的室内区域进行救援和勘探,或履行反恐使命。由而且近年来MEMS(微机电体系)结构的惯性传感器 随半导体技能的前进得到了迅速发展,使其低成本而高精度的希望得到了完成。MEMS惯性传感器组成的惯性导航设备结合轮式小车的里程计,可以发生导航和定位信息,削减对外部环境的倚赖,完成在外部环境条件(例如光照、墙面原料)不知道情况下的导航,因而本项目选用了具有强壮数字信号处理功用的DSP 28335芯片和PC操控终端,完成惯性传感器的数据收集、时序逻辑操控、与驱动体系通讯和地图显现功用, 具有体积小、成本低、功耗低一级长处。综上所述,本文将选用低成本的MEMS器材,结合DSP和卡尔曼滤波算法,能完成较高精度的轮式小车导航和定位。
随半导体技能的前进得到了迅速发展,使其低成本而高精度的希望得到了完成。MEMS惯性传感器组成的惯性导航设备结合轮式小车的里程计,可以发生导航和定位信息,削减对外部环境的倚赖,完成在外部环境条件(例如光照、墙面原料)不知道情况下的导航,因而本项目选用了具有强壮数字信号处理功用的DSP 28335芯片和PC操控终端,完成惯性传感器的数据收集、时序逻辑操控、与驱动体系通讯和地图显现功用, 具有体积小、成本低、功耗低一级长处。综上所述,本文将选用低成本的MEMS器材,结合DSP和卡尔曼滤波算法,能完成较高精度的轮式小车导航和定位。
体系体系架构
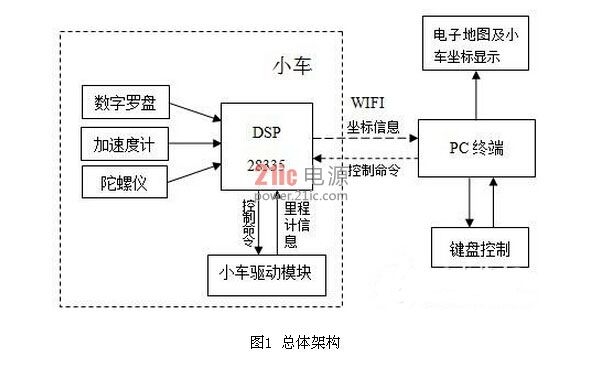
本文的方针是研制一个轮式小车惯性导航体系,可以经过wifi完成PC终端和手持终端操控轮式小车举动以及小车所收集数据的传输。建立如下图1所示的体系,TI公司的浮点DSPTMS320F28335芯片作为主数字信号处理器,收集各MEMS惯性传感器的信号并处理,处理成果经过WIFI将数据输送到PC终端;PC终端担任显现定位成果和地图显现,并向小车驱动体系发送操控指令,一起接纳驱动体系反应的里程计信息。
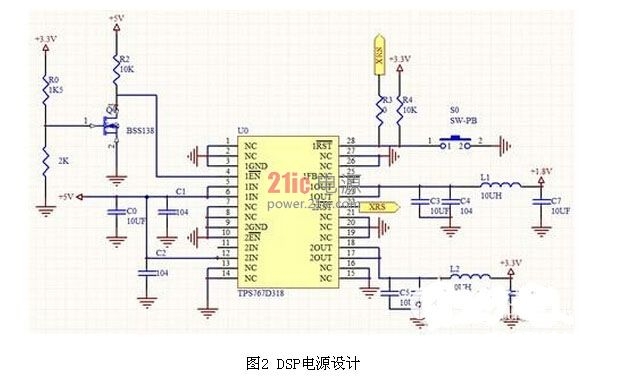
硬件规划上,首要分为中心板和驱动板。中心板包含DSP最小体系,JTAG下载口规划,体系电源供应电路和MEMS传感器,WIFI模块等。而驱动板首要规划的内容是直流大电机的驱动模块。TMS320F28335作业时需求的电压不同:内核电压(1.9 V)与I/O供电电压(3.3 V),关于电源比较灵敏,所以电源部分运用两路输出电源器材TPS767D318来完成,如图2所示。一起依据仿真试验和实践焊接电路的测验,电源模块输出端最好运用一些容值不小于10uf的维护电容,且不能运用贴片电容,不然作业不稳定。
在电源规划中,考虑到TPS767D318芯片可以发生复位信号,所以在中心板上并没有再别的为DSP规划复位电路。
TAG下载口电路规划
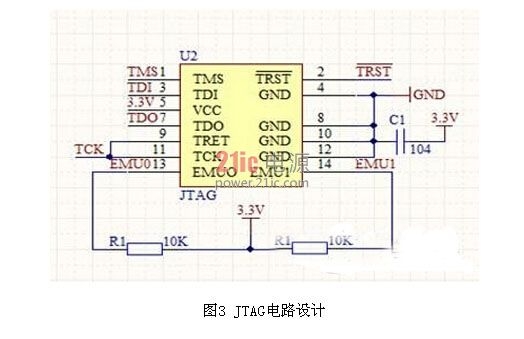
图3为JTAG电路,依照仿真器的通讯引脚挑选14脚的仿真接口,一起要留意EMU0和EMUl信号有必要经过上拉电阻衔接至电源,其中上拉电阻为10kΩ。
车驱动板规划
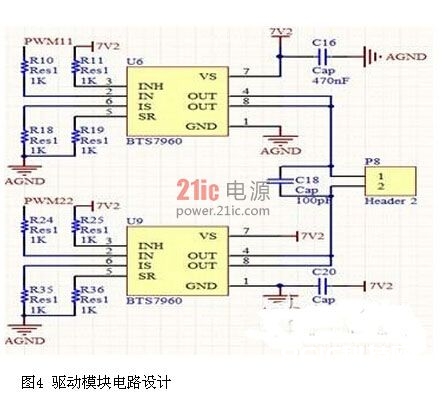
在本设备中,咱们选用BTS7960作为直流电机驱动芯片。BTS7960是集成的大电流半桥驱动,其内部包含了一片NMOS、一片PMOS和一片半桥门集驱动,在IOUT = 9 A,VS= 13.5V,Tj = 25 °C 时,其内阻抗为17mΩ。设备选用了两个直流大电机,如图4所示为驱动单个电机前后转向的电路图。
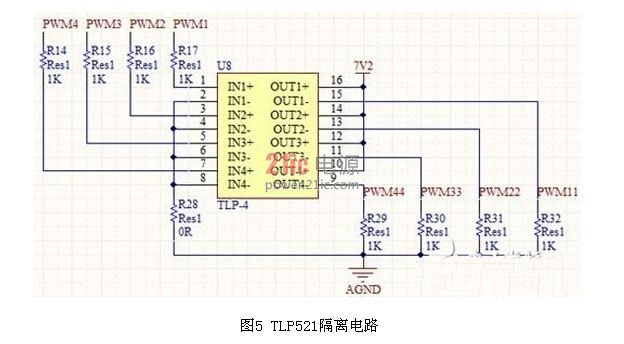
在电机驱动这儿,需求留意一个细节,便是电机在滚动进程中有或许会发生反向的电动势,使电流一会儿过大,导致单片机复位甚至有或许烧坏芯片。因而在规划进程中,可以考虑在单片机PWM输入到电机驱动接口的当地增加光耦器材阻隔或许二极管。如图5所示,驱动板挑选了tlp521-4这种光耦器材规划阻隔电路,减小电压的搅扰,减化电路的规划,一起也把四路PWM的I/O电平从3.3上拉到5V。
在软件程序规划上,首要使用九自由度惯性导航传感器(ITG3200+ADXL345 +HMC5883L ),结合DSP和卡尔曼滤波算法,能完成较高精度的轮式小车导航和定位。本文所规划的轮式小车室内惯性导航设备,剖析了该软件规划的各个模块的详细完成办法。经试验成果表明,该规划可以实时监测到移动机器人的方位信息,并对其能完成有用操控。一起其低成本、高精度、易操作的特点将进一步使用于例如巡查机器人、救援机器人等专业范畴,必将招引国内外很多的出资商对其出资并进行更进一步的研制与使用,使其有着非常广阔的立异创业远景、使用远景和市场远景。






