


0 导言
本文介绍一种依据C2051 的全数字变频操控器,它能够依据外界环境的改动(如压力、温度、输入电压和人为地设定等),自适应地改动输出电源频率,到达自适应对电机调速的意图。在操控算法中,选用含糊理论,设定从属函数,求出操控输入的从属度,并进行含糊规矩判别,得出含糊的操控输出。然后进行含糊量的核算,得出准确的操控输出,到达操控运转频率的意图。通过试运转标明,自适应能力强,电路简略,特别适合于低压带负荷发动困难的边远地区用户。
1 变频操控器体系结构原理
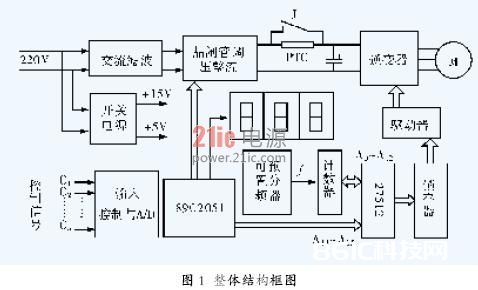
下面,以1.5 kW输出功率的变频操控器为例进行介绍,该体系结构如图1所示。逆变器选用三菱IPM模块PM20CTM060,自身具有操控电源欠压确定、过热维护、过流维护、短路维护,一旦维护动作,送出一个毛病信号(F0)。运算操控单元选用ATMEL 公司的89C2051 高性能价格比单片机 [1],该单片机选用80C31内核指令体系,内含2KB Flash
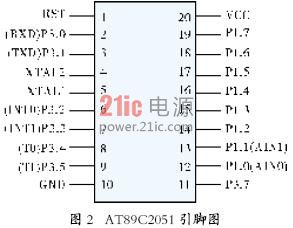
用户存储器,编程较为便利。AT89C2051引脚如图2所示。
该体系的作业原理如下:外部模拟量(温度、电压、界面设定等)经A/D转化后送入89C2051,经运算处理后,求得运转频率,然后转化成预置分频器的倍数,操控寻址计数器IC4 输入脉冲的频率fc,然后操控27512已存波形数据的输出速度,到达变频的意图。27512的低11位地址(A0耀A10)由计数器寻址,操控具有一定调准则M 的SPWM 波形输出。高5 位地址(A11 耀A15)由89C2051直接寻址。操控具有不同M的SPWM波形。
因而可选择32种不同调准则的波形。体系的作业状况及环境参数均可由显现单元分类显现。整个显现部分由89C2051的RXD、TXD操控。
因为PM20CTM060 功率模块内含驱动单元,故只须光耦阻隔,就能够用数字电路进行驱动。
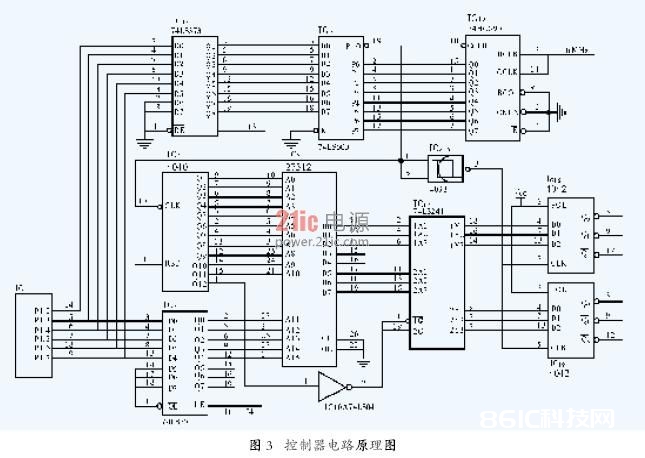
2 操控器电路设计
如图3所示,其间SPWM波形存于27512中。图中211个8 位字节存储一个具有固定调准则的SP原WM波形。因为SPWM 的对称性,211位只存一个周期的1/2,详细分配办法是每个字节的0、1、2 三位寄存三相SPWM 的0耀仔中的数值。3、4、5 三位寄存仔耀2仔中的数值。对应的寻址办法是IC4由0开端计数,IC17相应的1Y1、1Y2、1Y3输出0耀仔波形。当211
位计满后,半个周期输出结束,再计一次数时,IC4的Q12输出为1,经反向器驱动IC17的2Y1,2Y2,2Y3输出。这时,存于27512各字节中档的第3,4,5位的数据开端输出,然后发生SPWM的后半周期。这样重复循环,就可输出一个具有固定频率、固定调准则的波形。一个完好的SPWM波形共由4 096个脉冲组成。






