


1 电梯变频门机概述
电梯是现代生活中不行短少的东西,而电梯门机体系又是整梯体系中动作最频频的部件,其功能直接影响到整梯的功能。电梯门机分为直流门机、沟通异步变频门机、永磁同步门机[1(] 至于这三种门机的差异,因篇幅所限,不在本文剖析)。在这三种门机中,沟通异步变频门机是现在运用量最大的电梯门机,本文所剖析的便是这种门机。
沟通异步变频门机一般简称为变频门机,其构成首要分为三部分:变频门机操控体系、沟通异步变频电机、变频门机机械体系[2],三部分的联系如图1所示。

图1可知,操控体系用于操控变频电机运转,变频电机又拖动机械体系运转。
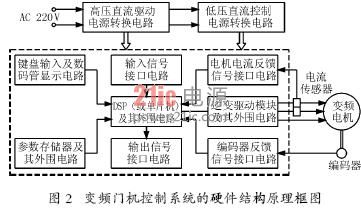
关于不同厂家的电梯,变频门机操控体系的详细规划会有所不同,但结构原理是根本相同的,图2 即为变频门机操控体系的硬件结构原理框图。
在图2 中,高压直流驱动电源为310 V 左右,用作驱动模块的逆变作业电源,低压直流操控电源的电压等级包含5 V、15 V、24 V等,不同厂家的体系会有所不同;参数存储器一般运用EEPROM;电流传感器一般设有两个,接在两相电机线上,第三相电机线的电流经过程序中的数学运算得到;编码器及其反应信号接口电路在“编码器操控方法”下需求,在“速度开关操控方法”下不需求,关于操控方法(即运动操控方法),将在下文剖析。
与变频门机操控体系的状况类似,关于不同厂家的电梯,变频门机机械体系的详细规划也会有所不同,但结构原理是根本相同。变频门机的机械体系分为两大部分:轿门侧机械部分和厅门侧机械部分,轿门和厅门经过一种称为“系合设备”的机械部件联接在一同,电机拖动轿门运动,轿门经过“系合设备”带动厅门一同运动。厅门侧机械部分除没有电机及其减速组织外,其他跟轿门侧机械部分类似,为节约篇幅,本文仅介绍轿门侧机械部分。变频门机轿门侧机械部分的结构示意图如图3 所示。
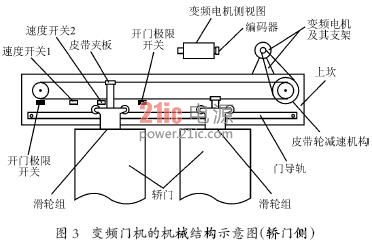
从图3可看出,轿门侧机械结构由两扇轿门和轿门上坎两大部分组成,上坎上散布着各种部件,图中所画为首要部件。其间滑轮组(两组)联接轿门与上坎,将轿门吊挂在上坎导轨上,滑轮组的皮带夹板卡住皮带,使得皮带能够拖动滑轮组在导轨上运动,然后拖动轿门运动。上坎上的开门极限开关和关门极限开关,用于检测轿门是否运动到开门极限方位或关门极限方位。电机尾部的编码器和上坎上的速度开关并不是一起都需求,这取决于不同的运动操控方法。
2 变频门机的运动操控方法及操控信号构成
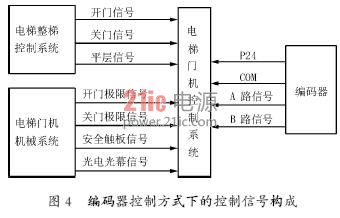
变频门机的运动操控方法分为“编码器操控方法”和“速度开关操控方法”。在运用“编码器操控方法”时,电机尾部设备有编码器,但上坎上不设备速度开关。在这种操控方法下,经过编码器既能检测轿门方位,又能检测轿门速度,因而能够运用方位和速度闭环操控,“编码器操控方法”下的操控信号构成如图4所示。
图4 中的开门信号、关门信号、平层信号由电梯整梯操控体系宣布,其间平层信号是指电梯抵达每一楼层平面方位时发生的信号;开门极限信号与关门极限信号是指轿门运动到开门极限方位和关门极限方位时,由开门极限开关和关门极限开关发生的信号;安全触板和光电光幕是检测障碍物的设备[3][4],设备在轿门的门沿上(图3 中未画出),这两个设备只要在关门过程中才有用,当有障碍物时,会发生安全触板信号和光电光幕信号,以便整梯操控体系和门机操控体系施行维护;编码器用来反应轿门运动速度、检测轿门方位和运动方向。“编码器操控方法”下的速度切换点经过检测轿门方位来确认。
在运用“速度开关操控方法”时,电机不带编码器,而是根据上坎的速度开关来检测速度切换点。在这种操控方法下,没有方位检测,也没有速度检测,因而只能运用方位和速度开环操控,“速度开关操控方法”下的操控信号构成如图5 所示。
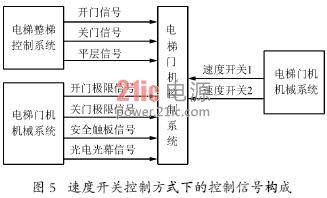
图5跟图4比较,仅仅编码器信号用速度开关信号代替,其他操控信号二者彻底相同。两个速度开关仅用作变频门机运动过程中的速度切换点。






