


长期以来用于体系中,以经过替代传统上的人工查看来进步出产质量和产值。从拾取和放置、方针盯梢到计量、缺点检测等运用,运用视觉数据能够经过供给简略的经过失利信息或闭环操控回路,来进步整个体系的功用。
视觉的运用并不仅仅在工业范畴;咱们也看到了相机在日常日子中的许多运用,例如用于核算机、移动设备,特别是在轿车中。摄像头仅仅是在几年前才被引进到轿车中,可是现在轿车中现已装备了许多摄像头,认为驾驶员供给完好的360°车辆视图。
可是谈到机器视觉范畴的最大技能进步,或许一直是处理才能。跟着处理器功用每两年翻一番,以及对多核CPU、GPU和FPGA等并行处理技能的持续重视,视觉体系规划人员现在能够将高度杂乱的算法运用于视觉数据,并创立更智能的体系。
处理技能的开展带来了新时机,而不仅仅是更智能或更强壮的算法。让咱们看看为制作机器添加视觉功用的运用事例。这些体系传统上规划为构成协作分布式体系的智能子体系网络,该体系答应模块化规划(见图1)。
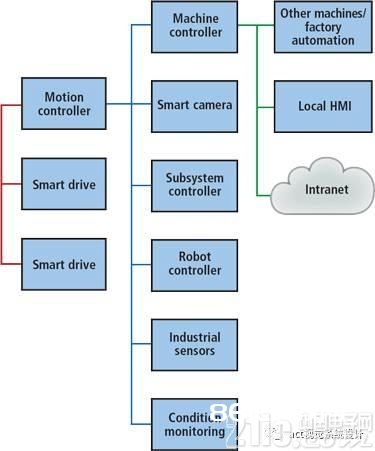
图1:智能子体系网络,其规划为构成协作分布式。该体系答应模块化规划,但选用这种以硬件为中心的办法或许导致功用瓶颈。
可是,跟着体系功用的进步,选用这种以硬件为中心的办法或许遇到困难,由于这些体系一般选用时刻要害和非时刻要害协议的混合来联接。经过各种通讯协议将这些不同的体系联接在一起,会导致推迟、确认性和吞吐量方面呈现瓶颈。
例如,假如规划者企图运用这种分布式架构开发运用,并且有必要在视觉和运动体系之间坚持严密集成,例如在视觉伺服中所需求的,那么或许遇到由于缺少处理才能而带来的首要功用应战。此外,由于每个子体系都具有自己的操控器,这实践上会下降处理功率。
最终,由于这种以硬件为中心的分布式办法,规划人员不得不运用不同的规划东西来规划视觉体系中每个子体系的特定视觉软件,以及用于运动体系的运动专用软件等。这关于规划较小的规划团队而言特别具有应战性,由于一个小团队乃至是一名工程师,需求担任规划中的许多部分。
走运的是,有更好的办法为先进的机器和设备规划这些体系,这是一种简化杂乱性、进步集成度、下降危险和缩短上市时刻的办法。假如咱们将思想从以硬件为中心转向以软件为中心的规划办法,成果会怎么样(见图2)?假如咱们运用能用单一规划东西完结不同使命的编程东西,那么规划人员就能够在他们的软件中反映机械体系的模块性。

图2:以软件为中心的规划办法,答应规划人员经过在单个强壮的中整合不同的自动化使命(包含视觉查看、、I/O和HMI)来简化操控体系结构。
这答应规划人员经过在单个强壮的嵌入式体系(见图3)中整合不同的自动化使命(包含视觉查看、运动操控、I/O和HMI)来简化操控体系结构。这消除了子体系通讯的应战,由于现在悉数子体系都在单个操控器上的相同软件仓库中运转。 高功用嵌入式视觉体系是这种集中式操控器的最佳候选者,由于这些设备中现已内置了这些功用。

图3:将处理器与FPGA和I/O结合在一起的异构架构,不仅是规划高功用视觉体系、也是集成运动操控、HMI和I/O的抱负解决方案。
让咱们来看看这种集中式处理架构的一些长处。以视觉引导运动运用为例,例如柔性馈送,其间视觉体系为运动体系供给引导功用。这儿,零件的方位和取向都是随机的。在使命开始时,视觉体系拍照零件的图画以确认其方位和取向,并将该信息供给给运动体系。
然后,运动体系依据图画坐标将致动器移动到零件所在的方位,并捡起它。它也能够运用此信息在放置零件之前校对方向。经过这种办法,规划者能够消除从前用于定向和定位零件的任何夹具。这不光下降了本钱,还答应运用程序能更容易地习惯新的零件规划,只需求修正软件即可。
以硬件为中心的架构的要害长处是其可扩展性,这首要归因于体系之间的以太网链路。可是也有必要特别注意经过该链路的通讯。如前所述,这种办法的应战在于以太网链路的不确认性,并且带宽有限。
关于大多数仅在使命开始时给出引导的视觉引导运动使命,这是可接受的;可是也或许存在其他状况,其间推迟的改变或许是一大应战。将这种规划转向集中式处理架构,具有许多长处。
首要,由于能够运用相同的软件开发视觉体系和运动体系,规划者不需求了解多种编程言语或环境,因而下降了开发杂乱性。第二,消除了以太网网络上的潜在功用瓶颈,由于现在数据仅在单个运用中的环路之间传递,而不是在物理层之间传递。
这使得整个体系的运转具有确认性,由于悉数同享相同的进程。当将视觉直接引进操控回路中时,例如在视觉伺服运用中,这是特别有价值的。这儿,视觉体系在运动期间接连捕获致动器和方针零件的图画,直到运动完结。这些捕获的图画用于供给关于运动成功的反应。有了这一反应,规划人员能够进步现有自动化的精度和精密度,而无需升级到高功用运动硬件。
现在提出了一个问题:这个体系是什么姿态?假如规划人员即将运用能满意机器视觉体系所需的核算和操控需求的体系,并要与其他体系(如运动操控、HMI和I/O)无缝衔接,那么他们需求运用具有所需功用的硬件架构,以及每个这些体系所需的智能和操控才能。
这种体系的一个很好的挑选是:运用将处理器和FPGA与I/O相结合的异构处理架构。现已有许多职业出资这种架构,包含美国Xilinx公司的Zynq全可编程SoC(将ARM处理器与Xilinx 7系列FPGA架构相结合),以及英特尔数十亿美元收买Altera等。
关于视觉体系,运用FPGA特别有利,这首要是由于其固有的并行性。算法能够分隔,运转数千种不同的办法,并且能够坚持彻底独立。别的,这种架构的长处不仅仅体现在视觉方面,其对运动操控体系和I/O也大有裨益。
处理器和FPGA可用于履行高档处理、核算和拟定决议计划。规划人员简直能够经过模仿和数字I/O、工业协议、定制协议、传感器、致动器和继电器等,衔接到任何总线上的任何传感器。此架构还满意了其他要求,如时序和同步以及事务应战(如进步出产率)。每个人都期望更快地开发产品,这种架构消除了对大型专业规划团队的需求。
不幸的是,尽管这种架构供给了许多功用和可扩展性,可是完结它的传统办法需求专业知识,特别是在运用FPGA时。这为规划者带来了巨大危险,并有或许导致运用该架构不切实践乃至不或许。可是,运用集成软件(如NI LabVIEW),规划人员能够经过提取初级杂乱性,并将所需的悉数技能集成到单一开发环境中,来进步出产率,下降危险。
理论是一回事,将其付诸实践是另一回事。Master Machinery是台湾一家出产半导体加工设备的公司(见图4)。这种特定的设备运用机器视觉、运动操控和工业I/O的组合,将芯片从硅晶片上取下并封装。这是能运用图1中的分布式架构的机器示例,每个子体系能够独自开发,然后经过网络集成在一起。

图4:运用中央集权的、以软件为中心的办法,Master Machinery公司将其主机操控器、机器视觉和运动体系、I/O和HMI悉数集成到单个操控器中,功用是竞赛对手的10倍。
职业界这种机器每小时的产值大约为2000个零件。可是Master Machinery公司采取了不同的办法。他们规划了中央集权的、以软件为中心的架构,并将主机操控器、机器视觉和运动体系、I/O和HMI悉数集成到独自的操控器中,悉数都选用LabVIEW编程。除了不需求单个子体系完结本钱节省之外,这种办法还具有功用优势,其每小时大约能出产20000个零件,是竞赛产品的10倍。
Master Machinery公司成功的要害因素之一是能够将多个子体系组合在单个软件仓库中,特别是机器视觉和运动操控体系。运用这种一致的办法,Master Machinery公司不光简化了规划机器视觉体系的办法,并且还简化了怎么规划整个体系。
机器视觉是一项杂乱的使命,需求许多的处理才能。跟着摩尔定律持续添加处理元件(如CPU、GPU和FPGA)的功用,规划人员能够运用这些组件来开发高度杂乱的算法。规划人员还能够运用此技能来进步规划中其他组件的规划功用,特别是在运动操控和I/O范畴。
跟着悉数这些子体系功用的进步,用于开发这些机器的传统分布式架构将面对压力。将这些使命整合到单个操控器中,运转在单个软件环境下,消除了规划进程中的瓶颈,使规划人员能够专心于立异,而不用忧虑施行问题。






