


以TMS320F28335 DSP作为中心操控器,提出三相8极无刷直流电机操控体系的规划方案。对首要硬件电路和软件程序做了具体规划,并给出了相应的电路原理图和程序流程图。其间转速调理算法选用改善单神经元自适应PID操控算法,经过自适应调整操控参数,进步了操控体系对环境的自适应性。经过试验可知:所规划的无刷直流电机操控体系是可行的,选用改善单神经元自适应PID操控算法能够使无刷直流电机的呼应时刻更短,超调量和动摇更小。
0 导言
无刷直流电机是电力电子技能、微电子技能、操控理论和电机技能相结合的产品。具有发动时刻短、发动转矩和制动转矩大、调速规模大、结构简略、噪声低、可靠性高、保护周期长等长处。被广泛使用于国防、航空航天、机器人、自平衡车、无人机、电动汽车、家用电器、办公自动化以及工业进程操控等范畴。
本文给出了依据TMS320F28335 DSP的无刷直流电机的操控体系规划方案,对操控体系的首要硬件电路模块进行了具体规划,包含电机驱动电路和操控电路的规划。并给出了转速调理子程序的规划办法。
速度调理算法一般选用传统PID操控算法,但它的操控参数选用一次整定办法,要想在各个运转阶段都抵达杰出的操控作用,参数的确认往往难以完成。文献[3]提出了一种依据含糊调理的免疫反应PID操控,具有传统PID操控结构简略、可靠性高、鲁棒性强等长处,进步了抗干扰性和对工况的适应性;文献[4]将微粒群优化算法和单神经元自适应操控结合,使用在无刷直流电机的操控体系中,进步了体系的自适应性;文献[5]将遗传算法和含糊操控结合,对电机进行优化操控,操控体系的自适应性得到了进步。文献[6]使用RBF神经网络对无刷直流电机操控体系进行优化,对电机转速和相电流进行实时采样,批改神经网络的权向量,经过操控电枢电压完成对电机转速的操控。
本文选用改善单神经元自适应PID操控算法,能够对操控参数进行自适应调整,然后进步体系对环境的自适应性。试验标明,选用的改善单神经元自适应PID操控算法能够使无刷直流电机的呼应时刻更短,超调量和动摇更小。
1 体系整体规划方案
以TMS320F28335 DSP为中心操控芯片,规划了无刷直流电机操控体系。DSP经过捕获口CAPl、CAP2、CAP3捕捉方位传感器的跳变信号,触发捕获中止,经过读取3个CAP口的电平状况,得到电机操控字,然后DSP宣布相应的操控指令,以改动PWM信号的开关量,然后改动开关管的导通次序,完成对电机转速和旋转方向的操控。操控体系的规划框图如图1所示。
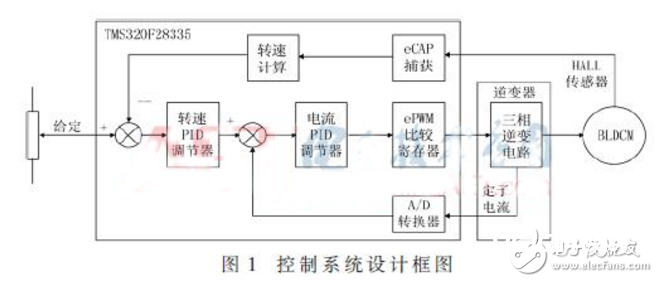
操控体系的操控目标为24 V/65 W的三相8极无刷直流电机,选用转速、电流双闭环完成对电机的转速操控。体系的外环为速度环,DSP依据给定速度值与经霍尔传感器得到的速度值经过改善单神经元自适应PID操控算法得到电流给定值。内环为电流环,对速度操控器的输出电流给定值与由经A/D采样得到的电流值比较,经过传统PID操控算法,给出对应的PWM操控信号,完成对电机的调速操控。
2 硬件电路规划
2.1 无刷直流电机驱动电路
功率改换电路的首要功能是将直流母线电压逆变为沟通电压来驱动无刷直流电机旋转。本文的操控目标是65 W的中小型电机,因而功率改换电路选用驱动芯片+MOSFE的办法,DSP输出的PWM信号经过功率放大、光电阻隔处理后送入驱动芯片,驱动功率管MOSFET注册和关断。
驱动芯片选用International Rectifier公司出产的IR2136,此芯片为三相逆变电路驱动器%&&&&&%,适用于驱动无刷直流电机、永磁同步和沟通异步电机等。驱动芯片的电路图如图2所示。
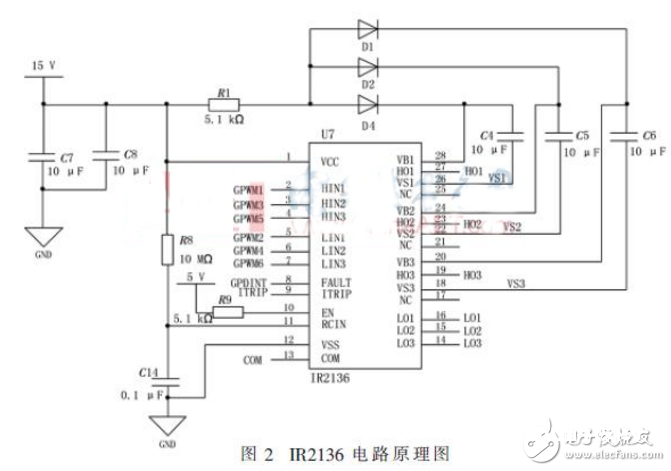
图2中,二极管D1、D2、D4与电容C4、C5、C6组成升压电路,二极管的作用是避免电流倒灌,电容的作用是存储电压。脉冲频率较高时,升压电路的电压为输入电压加上%&&&&&%存储电压,导致电压增大。规划升压电路是为了进步驱动电压幅值,使驱动芯片能够可靠地驱动高压侧功率管的注册。
2.2 操控电路
TMS320F28335的ePWM模块有ePWM1~ePWM6共6个子模块,每个ePWM子模块有两路PWM输出,别离为ePWMxA和ePWMxB。三相电流桥由6个功率管MOSFET组成,每个桥臂上的两个功率管MOSFET的操控信号彼此相关。所以,前3个ePWM子模块(ePWM1、ePWM2、ePWM3)就能够满意无刷直流电机的操控要求,PWM操控信号别离为ePWM1A和ePWM1B、ePWM2A和ePWM2B、ePWM3A和ePWM3B。由于DSP引脚输出信号的负载才能有限,所以输出的PWM信号需求经过功率放大器进步负载才能,选用的功率放大器为74HC245,相应的电路如图3所示。

3 转速调理子程序
釆用改善单神经元自适应PID操控算法完成转速的调理,算法能够对操控参数进行自适应调整,然后进步体系的抗干扰性和对环境的自适应性。算法表达式如下:
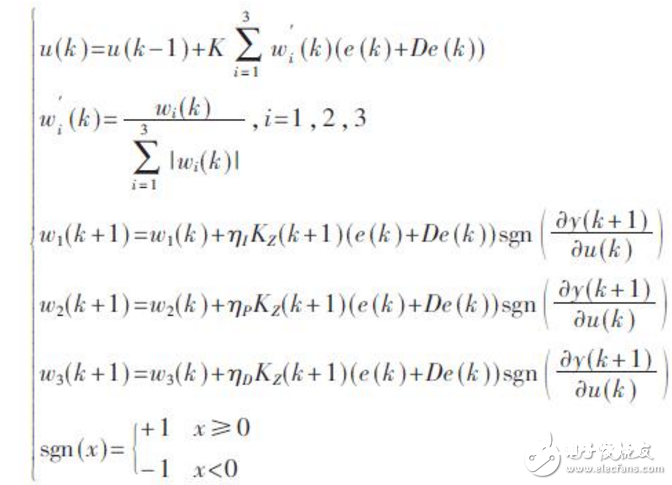
式中,ηI、ηP、ηD别离为积分、份额、微分的学习速率;wi(k)为加权系数;K为份额系数,K》0;e(k)为速度误差;De(k)为速度误差的改变量。
算法的完成进程为:电机运转时,经过DSP的通用定时器能够获取相邻两次霍尔信号改变的时刻距离,然后核算出电机的实时转速。与给定速度比较,能够得到转速的误差error。与前次得到的误差error_1相减,可得误差的改变量d_error。依据算法表达式,能够得到程序的流程图,如图4所示。

图中,r为给定转速,y为电机反应的实践转速,error和error_1为转速误差,d_error为误差的改变量,lr_p、lr_i、lr_d别离为份额、积分、微分的学习速率,wp、wi、wd、wp_1、wi_1、wd_1、wp_11、wi_11、wd_11、wadd为加权系数,K为份额系数,u和u_1为体系的输出。
4 试验结果与剖析
4.1 PWM操控信号的测验
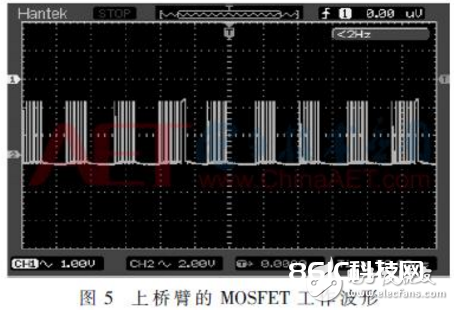
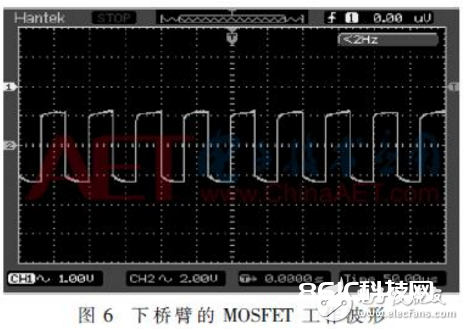
为了下降功率管MOSFET的功率损耗,选用上桥臂作业于PWM状况进行调压的操控办法,下桥臂作业于常通状况。如图5、图6别离为A相上桥臂和下桥臂的MOSFET作业波形。
4.2 转速信号检测
转速调理程序中首要选用传统PID操控算法,设置电机的运转时刻为5 s,给定转速为2 500 r/min。电机开端运转,期间每隔50 ms核算一次转速,并保存在数组中,5 s后电机中止运转。转速调理程序选用改善单神经元自适应PID操控算法,重复上述试验,别离得到如图7、图8所示的速度呼应曲线。
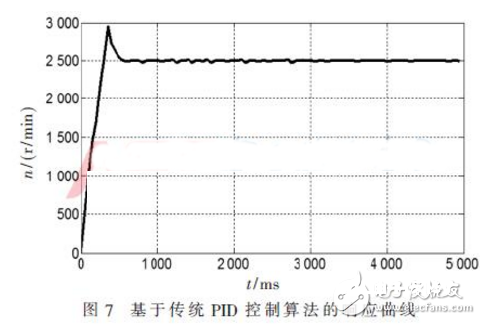
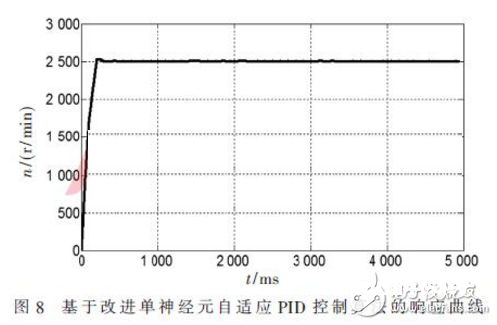
经过比照上面速度呼应曲线,能够得出:在给定转速(2 500 r/min)下,选用传统PID操控算法,体系自空载发动抵达稳态所需时刻为0.6 s,且超调量较大,约为20%;选用改善单神经元自适应PID操控算法,体系自空载发动后在较短时刻内(约0.2 s)进入安稳状况,超调量很小,仅为1%左右,此外,速度曲线的动摇很小。
5 定论
本文以三相8极无刷直流电机为操控目标,规划了无刷直流电机操控体系,对首要硬件电路和软件程序做了具体规划,并给出了相应的电路原理图和程序流程图,其间转速调理算法选用改善单神经元自适应PID操控算法。试验标明,所规划的无刷直流电机操控体系是可行的,转速调理选用改善单神经元自适应PID操控算法,能够使无刷直流电机的呼应时刻更短,超调量和动摇更小,抵达了预期意图。
作者:岳学磊,白 鹏,杨瑞坤,华伟民
参考文献
[1] 马文斌,杨延竹,洪运。步进电机操控体系的规划及使用[J]。电子技能使用,2015,41(11):11-13.
[2] 徐龙威,杨帆,徐令令,等.依据TMS320F28335无刷直流电机操控体系规划[J].电子丈量技能,2013,36(9):79-83.
[3] 夏长亮,刘丹,王迎发,等.依据含糊规矩的无刷直流电机免疫PID操控[J].电工技能学报,2007,22(9):68-73.
[4] 代睿,曹龙汉,何俊强,等.依据微粒群算法的无刷直流电机单神经元自适应操控[J].电工技能学报,2011,26(4):57-63.
[5] 夏长亮,郭培健,史婷娜,等.依据含糊遗传算法的无刷直流电机自适应操控[J].我国电机工程学报,2005,25(11):129-133.
[6] 胡云宝,王加祥,曹闹昌.依据RBF神经网络无刷直流电机调速体系[J].微电机,2013,46(1):63-66.
2016年电子技能使用第4期






