


一般机器人体系由机械手、环境、使命和操控器四个相互效果的部分组成。咱们称一般装置在机器人机械手上的传感器 为内传感器(Inner Sensons),而称作为环境的一部分的传感器为外传感器(External Sensons)。下面将以此为主,结合机器人传感器其它分类办法进行论述。
为内传感器(Inner Sensons),而称作为环境的一部分的传感器为外传感器(External Sensons)。下面将以此为主,结合机器人传感器其它分类办法进行论述。
机器人工业近年来开展很快,2012年全球产值为16万台,欧、美、日等工业发达国家机器人商场已比较老练,已处于平增加阶段。其机器人密度(万名职工运用机器人台数)韩国为347台,日本为339台,法国为261台,而我国为10台(有统计数据称为21台, 仅供参考)。而我国机器人商场也开展很快,工业机器人每年装机量增加速度均超越20%,2010年装机量为52290台,2011年上涨到74317台,完结了42%的增加率。在2012年,我国出台了《智能制造科技开展“十二五”专项规划》,2013年4月21日还成立了“我国机器人工业联盟”,这些均证明了我国机器人工业将会有更大的开展。
机器人产品现在分类为工业机器人和服务机器人两大类。国内也有分为工业机器人和特种机器人两大类的;或分为一般机器人和智能机器人两大类;或分为一般机器人和移动机器人两类;或分为一般机器人和拟人机器人两类等。现在工业机器人多用于转移、分拣、上下料、包装、码垛、焊接、喷涂、打磨、抛光、切开、摆放、装置等方面。
跟着智能化的程度进步,机器人传感器使用越来越多。智能机器人首要有交互机器人、传感机器人和自主机器人3种。从拟人功用动身,视觉、力觉、触觉最为重要,早已进入实用阶段,听觉也有较大开展,其它还有嗅觉、味觉、滑觉等,对应有多种传感器,所以机器人传感工业也形成了出产和科研力气。
机器人的操控体系相当于人类大脑,履行机构相当于人类四肢,传感器相当于人类的五官。因而,要让机器人像人相同接纳和处理外界信息,机器人传感器技能是机器人智能化的重要表现。
传感器是机器人完结感觉的必要手法,经过传感器的感觉效果,将机器人本身的相关特性或相关物体的特性转化为机器人履行某项功用时所需求的信息。根据传感器在机器人上使用的意图和运用规模不同,可分为内部传感器和外部传感器。
内部传感器用于检测机器人本身情况(如手臂间视点、机器人运动工程中的方位、速度和加速度等);外部传感器用于检测机器人所在的外部环境和目标情况等,如抓取目标的形状、空间方位、有没有妨碍、物体是否滑落等。
机器人传感器首要类别:
内传感器
机器介机电一体化的产品,内传感器和电机、轴等机械部件或机械结构如手臂(Arm)、手腕(Wrist)等装置在一起,完结方位、速度、力度的丈量,完结伺服操控。
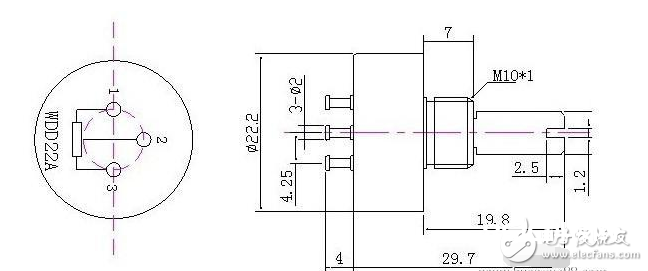
方位(位移)传感器
直线移动传感器有电位计式传感器和可调变压器两种。角位移传感器有电位计式、可调变压器(旋转变压器)及光电编码器三种,其间光电编码器有增量式编码器和肯定式编码器。增量式编码器一般用于零位不确认的方位伺服操控,肯定式编码器可以得到对应于编码器初始确认方位的驱动轴瞬时视点值,当设备遭到压力时,只需读出每个关节编码器的读数,就可以对伺服操控的给定值进行调整,以避免机器人启动时发生过剧烈的运动。
速度和加速度传感器
速度传感器有丈量平移和旋转运动速度两种,但大多数情况下,只限于丈量旋转速度。使用位移的导数,特别是光电办法让光照耀旋转圆盘,检测出旋转频率和脉冲数目,以求出旋转视点, 及使用圆盘制成有缝隙,经过二个光电二极管区分出角速度,即转速,这便是光电脉冲式转速传感器。
此外还有测速发电机用于测速等。
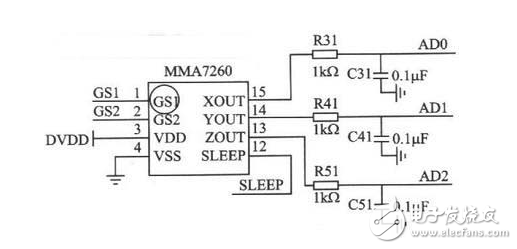
应变仪即弹性丈量仪,也是一种应力传感器,用于加速度丈量。加速度传感器用于丈量工业机器人的动态操控信号。一般有由速度丈量进行推演、已知质量物体加速度所发生动力,即使用应变仪丈量此力进行推演,还有便是下面所说的办法:
与被测加速度有关的力可由一个已知质量发生。这种力可认为电磁力或电动力,终究简化为对电流的丈量,这便是伺服回来传感器,实践又能有多种振荡式加速度传感器。
力觉传感器
力觉传感器用于丈量两物体之间效果力的三个重量和力矩的三个重量。机器人中抱负的传感器是粘接在依从部件的半导体应力计。详细有金属电阻型力觉传感器、半导体型力觉传感器、其它磁性压力式和使用弦振荡原理制造的力觉传感器。
还有转矩传感器(如用光电传感器丈量转矩)、手段传感器(如国际斯坦福研究所的由6个小型差动变压器组成, 能丈量效果于腕部X、Y和Z三个方向的动力及各轴动转矩)等。
因为机器人开展前史较长,近年来遍及采用以沟通永磁电动机为主的沟通伺服体系,对应方位、速度等传感器很多使用的是:各种类型的光电编码器、磁编码器和旋转变压器。

外传感器
以往一般工业机器人是没有外部感觉才能的,而新一代机器人如多关节机器人,特别是移动机器人、智能机器人则要求具有校对才能和反响环境改变的才能,外传感器便是完结这些才能的。
触觉传感器
微型开关是触摸传感器最常用型式,还有阻隔式双态触摸传感器(即双稳态开关半导体电路)、单模拟量传感器、矩阵传感器(压电元件的矩阵传感器、人工皮肤——变电导聚合物、光反射触觉传感器等)。
应力传感器
如多关节机器人进行动作时需求知道实践存在的触摸、触摸点的方位(定位)、触摸的特性即估量遭到的力(表征)这三个条件,所以用上节已指出的应变仪,结合详细应力检测的根本假定,如求出作业台面与物体间的效果力,详细有对环境装设传感器、对机器人腕部装设测试仪器用传动装置作为传感器等办法。
挨近度传感器
因为机器人的运动速度进步及对物体装卸或许引起损坏等原因需求知道物体在机器人作业场地内存在方位的先验信息以及恰当的轨道规划,所以有必要使用丈量挨近度的遥感办法。挨近传感器分为无源传感器和有源传感器,所以除天然信号源外,还或许需求人工信号的发送器和接纳器。
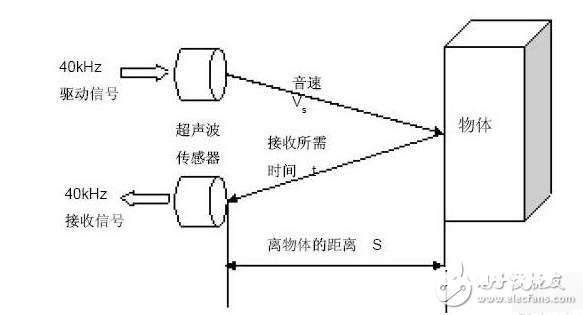
超声波挨近度传感器用于检测物体的存在和丈量间隔。它不能用于丈量小于30~50cm的间隔,而测距规模较大,它可用在移动机器人上,也可用于大型机器人的夹手上。还可做成超声导航体系。
红外线挨近度传感器,其体积很小,只要几立方厘米大,因而可以装置在机器人夹手上。
声觉传感器
用于感触和解说在气体(非触摸感触)、液体或固体(触摸感触)中的声波。声波传感器杂乱程度可以从简略的声波存在检测到杂乱的声波频率剖析, 直到对接连天然语言中独自语音和词汇的区分。
触摸式或非触摸式温度传感器
近年在机器人中使用较广,除常用的热电阻(热敏电阻)、热电偶等外,热电电视摄像机测及感觉温度图画方面也获得开展。
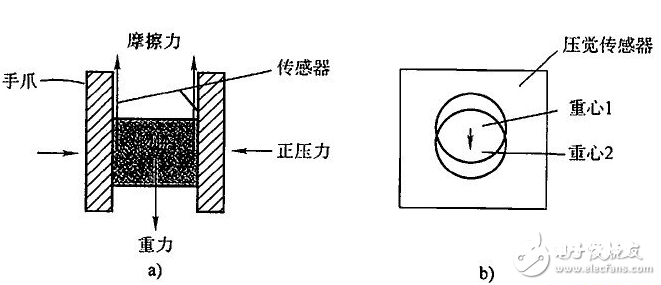
滑觉传感器
用于检测物体的滑动。当要求机器人捉住特性不知道的物体时,有必要确认最恰当的握力值,所以要求检测出握力不行时所发生的物体滑动信号。使用这一信号,在不损坏物体的情况下,牢牢捉住物体。
现在有使用光学体系的滑觉传感器和使用晶体接纳器的滑觉传感器,后者的检测灵敏度与滑动方向无关。
间隔传感器
用于智能移动机器人的间隔传感器有:激光测距仪(兼可测角)、声纳传感器等,近几年得到开展。
视觉传感器
20世纪50年代后期呈现,开展十分迅速,是机器人中最重要的传感器之一。机器视觉从20世纪60年代开端首要处理积木国际,后来开展到处理室外的实际国际。20世纪70年代今后,实用性的视觉体系呈现了。视觉一般包含三个进程:图画获取、图画处理和图画了解。相对而言,图画了解技能还很落后。
传感器的首要目标:
动态规模:是指传感器能检测的规模。比方电流传感器可以丈量1mA-20A的电流,那么这个传感器的丈量规模便是10log(20/0.001)=43dB. 假如传感器的输入超出了传感器的丈量规模,那么传感器就不会显现正确的丈量值了。比方超声波传感器对近间隔的物体无法丈量。
分辨率:分辨率是指传感器能丈量的最小差异。比方电流传感器,它的分辨率或许是5mA,也便是说小于5mA的电流差异,它无法检测出。当然越高分辨率的传感器价格就越贵。
线性度:这是一个十分重要的目标来衡量传感器输入和输出的联系。
频率:是指传感器的采样速度。比方一个超声波传感器的采样速度为20HZ,也便是说每秒钟能扫描20次。
机器人传感器的要求和挑选
机器人传感器的挑选取决于机器人作业需求和使用特色,对机器人感觉体系的要求时挑选传感器的根本根据。
精度高、重复性好;
稳定性和可靠性好
抗干扰才能强;
重量轻、体积小、装置便利。
小结
一切机器人传感器均与信号的检测今后的信号改换、处理联系十分亲近, 并且改换处理的软件作业量很大,又与人工智能等信息技能交融,所以本文仅仅抛砖引玉,有待深入探讨。






