


静脉输液是我国现在临床医治中最首要的一种输液方法,在实践作业中,医护人员一般是靠经历和调查经过滚动输液器上的滑轮对滴速进行手动调理的。本体系是一种非触摸式全主动的静滴检测和报警操控设备,时刻检测液体的滴速,并且在药液滴完后可以主动地堵截液体进行本地和长途报警,以告诉医护人员及时替换液体,对进步现代医疗服务体系的功率和质量都有着非常重要的含义。
1研讨含义
现在,医院静脉输液首要是人工操控,由人监控的静脉输液,无法正确调停药液流速,速度过快因为点滴里有钾元素的成分会形成血管影响,一般影响会表现为痛苦。但一般输液快慢要看本身身体状况,但输液仍是会对血管和心脏,肾脏有影响。运用现有的科技规划智能输液体系,即可以操控药液流速、检测药液剩余量、及时地中止输液避免血液回流等,医护人员可以经过主控室调查和调停一切药液流速,然后大大地节约人力。
本规划研讨一种操作便利,显现直观,具有报警功用的智能型液体点滴速度操控器,该体系让护理人员监控患者打点滴的进程时刻得到充分运用,避免患者在输液过程中呈现“回血”而形成的医疗事故,进步患者看病输液过程中的安全系数,一起削减护理人员的作业量,给护理人员更舒适的作业环境。
2体系整体规划计划
本体系选用ATMEGA16作为主操控芯片来操控液滴速度、报警信息以及液架的运动方向,输液器能经过遥控器恣意设定点滴速度,并且能接纳遥控器设定的信息以及能对异常状况进行报警。体系硬件结构框图如图1所示。下位机体系选用模块化的规划思维,包含液位检测与报警体系,滴速体系(包含滴速操控设备,钢珠等执行机构),单片机处理体系,通讯模块,自定义遥控器模块,显现以及报警模块,视点传感模块等部分。液位检测模块首要用于对液位的报警,执行机构在程序的操控下完结滴速操控;通讯模块用于和主机的通讯。
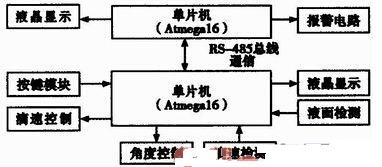
图1 硬件结构框图
2.1液滴检测计划
滴速检测选用的是红外检测技能,在茂菲氏滴管上方处对输液速度进行丈量。滴速检测设备结构图如图2所示。红外发射器宣布红外光后,光线穿透茂菲氏滴管后照射到光电三极管上,光电三极管将照射到它上面的光线变成电流信号进行输出。假如此刻茂菲氏滴管中没有液滴滴下,光线的衰减就比较小,照射到三极管上的电流就比较大;假如此刻茂菲氏滴管中有液滴滴下,因为液滴挡了一下光线,液滴对光线具有吸收和散射的作用,就使得光电三极管接纳到比较弱的光信号。将光电三极管输出的电流信号转换为电压信号,经过检测输出端电压信号的强弱就可以检测出有无液滴落下。把检测到的信号经过整形后送入单片机进行处理,就可以计算出输液的点滴速度。
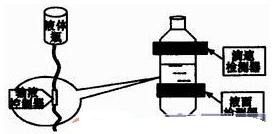
图2 滴速检测设备结构
2.2滴速操控计划
选用电磁铁和坐落调查瓶中的小钢珠以及相应的操控电路构成了具有“活动”作用的电动机用来操控液体滴速,可以到达对液滴的精确操控,运用“活动”电机结构和液位传感器完结了药液缺少时及时、精确地主动封闭液路功用,避免了“回血”现象的产生。滴速操控设备原理图如图3所示。
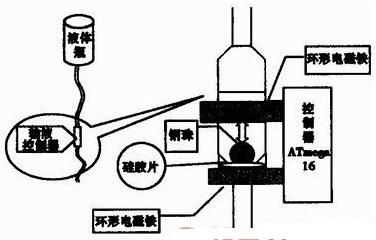
图3 滴速操控设备原理图
3程序流程图
为了便于程序的开发和今后的运用与保护,悉数程序选用模块化结构,即由一个主程序和若干个子程序模块构成。主程序首要完结初始化作业,包含守时器初始化、液晶模块初始化、中止初始化、体系时钟初始化、其他参数的初始化等。然后发动守时器进行守时,开中止答应单片机呼应内部中止和外部中止请求。各程序功用模块包含液晶显现、电机驱动、报警操控、滴速检测、液位检测等。主程序流程图如图4所示。
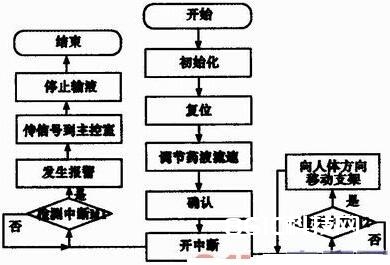
图4 主程序流程图
整个体系软件选用模块化结构。其间从站软件体系包含:主程序:担任读键、显现和报警。通讯中止程序:完结与主站通讯。滴速采样和储液瓶的随人体移动检测,其间,中止M1检测液位状况,产生中止中止输液,产生报警,中止M2检测人体移动方向,假如产生中止,单片机输出PWM脉冲,然后操控电机带动储液瓶定向移动。确保储液瓶永久的在人体上方。
主站的程序包含主程序和通讯中止程序,其间主程序担任对从站的设定,显现来自从站的实时值,及担任报警。通讯中止程序担任与从站进行通讯,完结数据的实时收集。
4总结
本体系选用ATMECA16操控芯片简化了体系的硬件结构,进步了体系的可靠性和实时性。运用“活动”电机结构和液位传感器完结了药液缺少时及时、精确地主动封闭液路功用,避免了“回血”现象的产生。药液缺少时,封闭液路的一起用户端选用声光提示,一起经过无线传输方法将相关信息发送至值勤室,及时告诉值勤医护人员。节约了很多的人力物力以及削减了人为差错。本体系对实践工程使用有必定的指导含义。






