


人们为了从外界获取信息,有必要借助于感觉器官。 而单靠人们本身的感觉器官,在研讨自然现象和规则以及生产活动中它们的功用就远远不够了。为习惯这种状况,就需求传感器 。因而能够说,传感器是人类五官的延伸,相同它们也构成了机器人的五官。
。因而能够说,传感器是人类五官的延伸,相同它们也构成了机器人的五官。
与模仿传感器相似,数字传感器也是由灵敏元器件、转化元器件、改换电路和辅佐电源4部分组成。其分类也完全相同,依据其根本感知功用分为热敏传感器、光敏传感器、气敏传感器、力敏传感器、磁敏传感器、湿敏传感器、声敏传感器、放射线灵敏传感器、色敏传感器和味敏传感器等十大类。而数字传感器相对于模仿传感器就要简略得多,它没有那些杂乱的带有公式的特性曲线,转而替代的是高电平与低电平信号。而相对操控器读取的是0与1的信号,这便是数字传感器。
下面咱们就按照在机器人身上使用的功用来说说这些数字传感器,信任使用了下面介绍的这些传感器后,你的机器人必定会更有活力。
制造机器人的第一个问题便是机器人的敞开与封闭,信任你必定离不开下面这些传感器。没错,它们扮演着敞开和封闭机器人的人物。1、机械按钮传感器
按钮开关(见图1)使用推进传动组织,使动触点与静触点接通或断开,然后完成电路换接的开关。它是一种结构简略、使用广泛的主令电器。按钮能够分为常开式按钮、常闭式按钮和复合式按钮,依据衔接方法的不同,按下按钮时可对应不同的电平信号。

图1机械按钮传感器
还有一种在机器人竞赛、日子中使用更为广泛的按钮传感器。尽管与一般按钮的原理相同,但外形却很独特,它便是磕碰开关
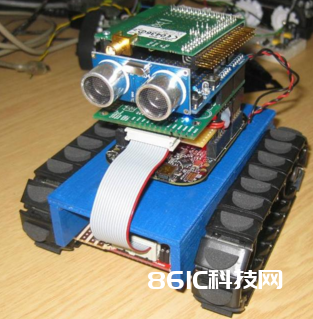
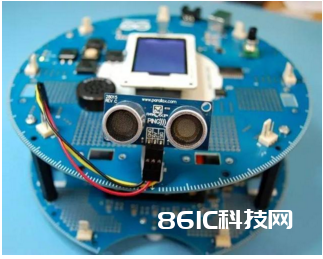
在机器人竞赛中,磕碰开关经常被用在磕碰壁障小车上(见图3)。小车前端的磕碰开关在磕碰到障碍物时就会给操控器反应一个信号,告知操控器前方左边或右侧有障碍物,程序再操控小车转弯避开障碍物。

图3磕碰避障小车2、电容接触传感器
接触传感器的原理是:当人体(手指)接触金属感应片时,由于人体相当于1个大电容,因而会在感应片和人体间构成一个电容,感应电容量一般有几皮法到几十皮法。使用这个最根本的原理,在外部建立相关电路(把引脚装备为输入,电容充电,那么接触时充任电容的人领会改动原有电容值和充电时刻),就能够依据这个电容量的改变,检测是否有人体接触金属感应片。

图4电容接触传感器
接触式%&&&&&%传感器(见图4)是在PCB上掩盖一层绝缘层制造而成,所以巩固、耐磨、绝缘、隔尘、隔水,并且外观漂亮新颖,已在广泛使用在许多范畴。此外它并非传统机械结构,避免了机械按钮中存在的机械故障与机械磨损等问题。
3、电磁继电器
下面介绍的开关就更巨大上了,它便是电磁继电器(见图5)。电磁继电器是一种电操控%&&&&&%,当输入量的改变到达规则要求时,就会被触发导通。它关系到操控系统和被操控系统之间的互动。一般使用于自动化的操控电路中,它实际上是用小电流去操控大电流运作的一种“自动开关”。
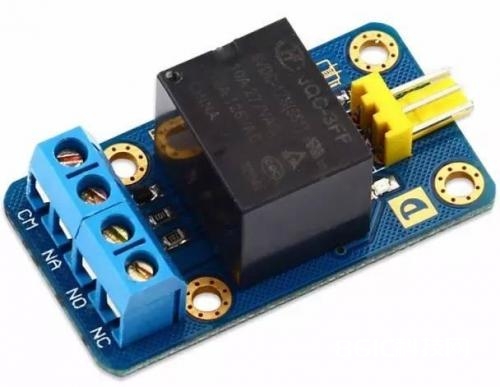
图5电磁继电器
由于电磁继电器具有这种弱电操控强电的特性,所以它多使用于大型机器人,特别是需求较高电压驱动的机器人和大部分工业机器人身上。操控电路与驱动电路的别离也能够避免两者相互搅扰,确保了操控部分的安全。






