


许多时分,一个电压不仅仅需求定性(高电平或许低电平),并且要定量(了解具体电压的数值)。这个时分就能够用到模数转化器(ADC)了。这次的内容是丈量开发板搭载的滑动变阻器(VR1)的电压,然后把ADC转化的成果经过UART打印出来。一起,也简略介绍了校准的办法。
SAM4E芯片中,ADC是由AFEC办理的。一起,AFEC能够运用一个多路复用器以挑选需求转化的信号的通道,也能够经过均匀屡次ADC转化的成果以进步转化精确度。
一、 电路图
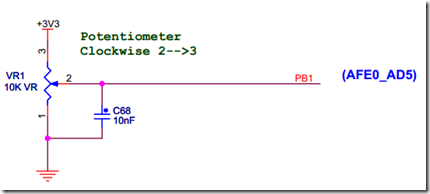
经过顺时针方向旋转该变阻器,PB1引脚电压将变大,其电压改变规模为0—3.3V。运用的AFEC为AFEC0,通道编号为5。
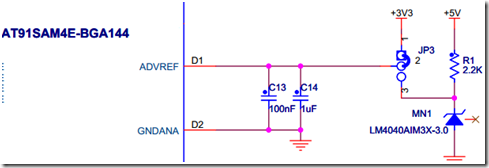
经过JP3能够挑选参阅电压的巨细。默许情况下,参阅电压为3.3 V。
需求留意的是,而在JP3短接2、3脚时,参阅电压为3.0 V。
二、 ADC电气特性
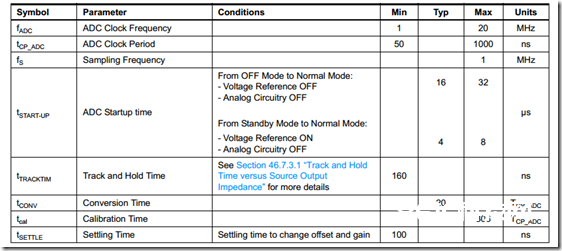
该AFEC有用的时钟规模为1—20 MHz,最大采样频率是1 MHz。一起也需记下发动、盯梢、设置等时刻,这在运用AFEC时会用到。别的,传送时刻在芯片手册中没有具体阐明,只阐明将TRANSFER字段设置为1。
因为需求运用较高波特率进行UART通讯,所以将MCK设置为96 MHz。在此情况下,能设置的最高的AFEC时钟频率为16 MHz(将AFEC_MR的PRESCAL参数设置为2),即每个AFEC时钟的周期为62.5 ns。
由此能够计算出,从封闭状态下,彻底发动AFEC最多需求512个AFEC时钟。在实践运用中,这个数字能够减小。
三、 AFEC初始化
准备作业为将MCK设置为96 MHz,敞开UART并让printf经过UART输出。
PMC及GPIO设置。
AFEC作业形式。有两个寄存器能够设置AFEC的作业形式:
AFEC0->AFEC_MR =
AFEC_MR_TRGEN_DIS // 封闭硬件触发
| AFEC_MR_SLEEP // 转化完结后进入睡觉形式
| AFEC_MR_PRESCAL(2) // AFEC CLK = 96M / 6 = 16 M
| AFEC_MR_STARTUP_SUT512 // MAX 32 us
| AFEC_MR_SETTLING_AST3 // MIN 100 ns
| AFEC_MR_ANACH_ALLOWED
| AFEC_MR_TRACKTIM(2) // MIN 160 ns
| AFEC_MR_TRANSFER(1)
| AFEC_MR_USEQ_NUM_ORDER
;
AFEC0->AFEC_EMR =
AFEC_EMR_RES_NO_AVERAGE // 进行 12bit 采样
;
设置增益参数及封闭差分形式:
AFEC0->AFEC_CGR = AFEC_CGR_GAIN5(0);
AFEC0->AFEC_DIFFR &= ~((uint32_t)1 << 5); // 不运用差分形式
启用通道:
1AFEC0->AFEC_CHER = AFEC_CHER_CH5;
四、 完结
转化指定通道的输入
uint16_t GetADCValue(int ch)
{
// 软触发以开端转化
AFEC0->AFEC_CR = AFEC_CR_START;
// 等候转化完结(经过查询相应的EOC位判别转化是否完结)
while ((AFEC0->AFEC_ISR & (1<<CH) )="=" 0);< p>
// 设置通道挑选寄存器,使AFEC_CDR显现指定通道的转化成果
AFEC0->AFEC_CSELR = AFEC_CSELR_CSEL(ch);
return AFEC0->AFEC_CDR;
}
轮询滑动变阻器的电压,并在电压动摇超越指定阀值时打印出当时电压。
const int min_diff = 10; // 阀值
int diff;
uint16_t adcv; // ADC转化的成果
uint16_t last_adcv = ~0;
while(1){
adcv = GetADCValue(5);
//判别电压动摇是否超越阀值
diff = (int32_t)adcv – last_adcv;
if (!(diff > (-min_diff) && diff < min_diff))
{
last_adcv = adcv;
printf("%d\n\r", (int)adcv);
}
// 等候
for (volatile int i=0; i< 0xFFFF; ++i);
}
五、 校准
在运转该示例时,发现当滑动变阻器VR1逆时钟旋至极限,即PB1引脚电压为0V时,ADC的输出为2048左右。而当PB1电压约为3.3 V的一半时,ADC输出值约为4095——即到达输出的最大值。
能够推测出存在一个约为2048的偏移差错。这个差错在一个ASF的示例中被提及:“AFEC内部的偏移为0x800……”。所以咱们需求对此进行校准:
AFEC0->AFEC_CSELR = 5;
//AFEC内部偏移为 0x800
//该校准在参阅电压为3.3V 时有用
AFEC0->AFEC_COCR = AFEC_COCR_AOFF(0x800);
AFEC_COCR的寄存器是作用于AFEC内部的DAC的:
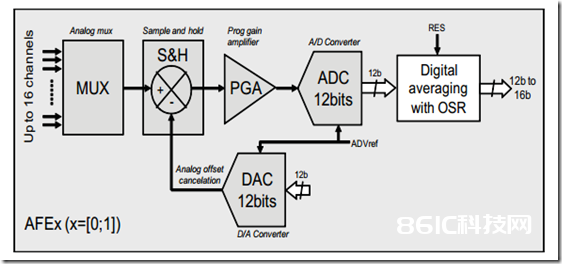
一起,经过该模块图也能够知道增益与偏移校准作用于输入V的方法如下:
偏移电压:
V_offset = ( offset / 4096 ) * V_ref
ADC进行转化的电压:
V_adc_in = ( V – V_offset) * gain
最终,将转化的数值加上0x800。






