


液位丈量作为工业生产中现场丈量的最常见的丈量方法,是保证工业生产主动化安稳进行的重要条件之一,液位丈量的一般方法首要包含投入式液位计的静压液位丈量、浮球液位计、磁翻板液位计、电容式液位传感器、雷达液位计、超声波液位计、气泡法等,每一种液位丈量方法和原理都不尽相同,都存在各自优缺陷,完美无瑕,担任悉数条件的液位丈量方法是不存在的。用户在详细运用之前应该关于详细实践的工况状况进行挑选,其寻求的最终目标则是尽最大或许精确丈量被测介质的液位值。
一.压力变送器丈量液位的作业原理
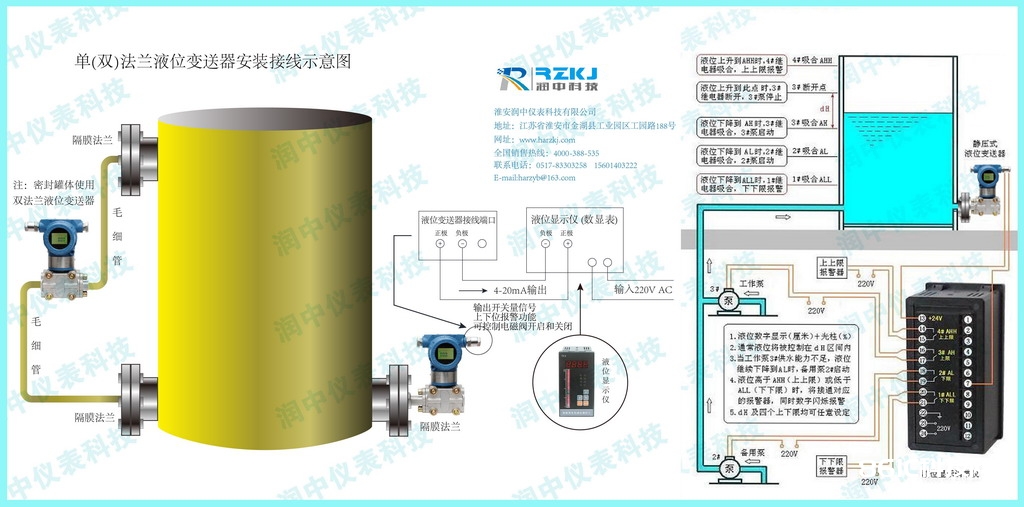
如图1所示,我公司磨机浆液箱丈量液位选用的是磨合式压力变送器,一般选用法兰装置的方法,变送器带装置法兰与罐体上的配对法兰用螺栓衔接,经过丈量被测点的压力值,依据流体力学的可知P=ρgh,其间ρ为被测介质的密度,g为重力加速度,常数,h为被测介质的液位高度,压力变送器将压力信号转换成4—20mA的直流输出电信号,操控体系经过输出电流值的巨细,计算出被测介质的液位值h。
二.存在的问题
在对压力变送器的量程进行设守时一般是依据液位改变规模hmin—hmax和被测介质的密度ρ,计算出压力值的规模Pmin—Pmax。一般以为被测介质的密度ρ在整个丈量进程中是固定不变的。因而这种丈量方法关于被测介质密度不发生改变的工况,丈量的液位值精确。但关于湿磨机浆液箱而言,由于要使磨机制备的浆液到达供浆体系的要求,浆液的密度改变是需求有一个进程的,即使是在正常运转时浆液的密度也不是固定不变的。并且磨机浆液箱的液位值需求引用到整个磨机的操控体系中,当磨机浆液箱液位低于液位下限时磨机就要停运,当液位高于液位上限时磨机浆液箱浆液就会呈现溢流。在整个浆液制备的进程中浆液密度的改变规模从1.0kg/m3—1.4kg/m3改变。
例如在设定压力变送器的压力量程时是将密度值设定为ρ定=1.0kg/m3时,假如被测介质的液位改变规模hmin—hmax=1—3m时,压力量程则设定为9.8—29.4KPa,输出设定为4—20mA。假如实践的被测介质实践密度升高到ρ实=1.2kg/m3,液位值为2米时压力变送器丈量到的压力值为23.52KPa,压力变送器的输出电流为15.2mA,该电流信号经过操控体系运算后的液位值为2.4m,较实践液位偏高了0.4m,丈量差错为20%,超过了操控体系对被测参数的精确度要求。并且被测介质的密度与压力变送器的设定密度之间的差错值越大,则丈量出的液位值与实践液位值值之间的差错也就越大。
由于浆液密度的改变规模较大,所以构成压力变送器丈量的液位值与实践磨机浆液箱的液位值有很大的差错,简单引起磨机操控体系的误动作,所以怎么有用的进步液位的丈量精确度在磨机操控体系中就显得尤为重要。
三、处理的方法
从存在的问题中可以看出,构成丈量液位值禁绝的首要原因是浆液的密度在运转进程中不是固定不变的,是一个随体系运转工况而随时改变的变量,怎么将密度这个变量的改变对液位丈量所构成的差错加以批改,到达丈量液位与实践液位共同的意图。鉴于此,在液位操控单元中引入了密度操控单元,将密度操控单元丈量的密度值与压力变送器中设定的密度值比照,计算出由于密度改变而发生的液位差异,并差异经过运算加以消除,保证输出液位值的实在。
经过作业原理可以看出,在被测介质的罐体增加了密度丈量的环节,密度丈量也是经过差压变送器丈量罐体固定两点之间压差的改变,得出被测介质的实时密度值。压差值ΔP=ρg(h1-h2),其间ρ为被测介质的密度,g为重力加速度,h1-h2为1、2两个丈量的高度差。差压变送器也是压力的改变值转化成相应的4—20mA的直流输出,供操控体系运用,计算出被测介质的密度值,在液位计算单元内用实践密度来批改设定密度差异,然后得到与实践液位较为挨近的液位值,为操控体系的精确丈量供给可靠地数据保证。
比较简略的批改原理为:依据实践丈量的被测介质密度ρ实与设定密度ρ定之间的差值Δρ,近似计算出由于Δρ改变所导致的压力改变值ΔP,然后计算出液位改变值Δh。ΔP=Δρgh测,Δh=ΔP/(ρ实g),操控体系输出液位值h=h测-Δh。原理图如图3下:
四.批改成果
如在存在问题中所举例,参加该环节今后,经过操控体系运算后的液位输出值为h输出=h测-Δh=2.4-0.4=2m,输出液位与丈量液位共同,克服了由于被测介质密度改变而导致的输出液位与实践液位存在差错的现象,保证了整个操控体系丈量数据的实在性。
五、结语
在运用压力变送器丈量被测介质密度改变的液位环境中,经过在加装密度丈量环节,在得到实践被测介质密度的条件下,对压力变送器丈量的液位值进行批改运算,可以比较精确的得到被测介质的实践液位值。






