


介绍:
并联机器人以其刚度大、承载才能强、差错小、精度高、自重负荷比小、动力功用好等长处,不只仅是当时机器人研讨范畴的热门,并且正逐渐走出试验室被工业界所认可。安稳、快速、准确的敞开式数字操控体系是限制并联机器人展开的瓶颈之一。其间实时性较强的多轴运动操控卡和功用完善的软件开发渠道为其技能要害,使用NI公司的一系列软硬件产品不只可以完结机器人的准确多轴运动操控,并且节约了开发周期、下降了体系本钱、易于保护晋级,特别是虚拟仪器技能的使用,使得体系可以有一个十分友爱的人机沟通界面。这些长处为多自由度并联机器人走向市场供给了确保。
本计划中,以LabVIEW为软件渠道,以嵌入多轴运动操控卡(PXI-7356)的PXI开发渠道为硬件根底,充分利用各种软件模块和工具包,快速开发了满意六维运动的6-DOF(Degree of Freedom)并联机器人操控体系。在本操控体系的开发和研发进程中完结了多电机同步、多轴和谐轨道操控、轨道曲线实时显现与挑选、面板的动态载入与重构、信息的调用与同享等功用。试验成果证明,使用NI公司系列产品不只可以快速地开宣布并联机器人的操控体系,进步体系的性价比;并且能得到比较完美的体系特性,如:25KHz—25.6MHz的编码器反应信号滤波规模使得体系可以在强电搅扰的工业现场的安稳作业,6轴PID操控周期可以抵达250μs使得实时性远远高于一般操控操控体系1ms的要求,机器人六轴和谐运动后的结尾执行器稳态差错可达1μm表现了体系准确的特性。
研讨布景:
并联机器人以其杰出的功用正在走出试验室,步入工业界和人们最为了解的日常日子中。早在1962年Gough and Whitehall就把并联机器人作为轮胎检测机。最近几十年中,并联机器人被用于飞行器模拟器、微操作机器人、手术机器人以及大型射电望远镜中的比如不胜枚举。但是,此类并联机器人大多存在开发周期长、体系不敞开保护和晋级困难、造价昂扬以及体系特性不完善等缺陷,这也是限制并联机器人全面走向市场的瓶颈。如安在较短的时刻内开宣布体系特性好、本钱低、功用完全、界面友爱的多自由度并联机器人操控体系是一项挑战性的作业。
本文以6-PPPS并联机器人为操控目标,以NI公司的系列软硬件产品为根底,依托国家天然基金(No. 30770538)的支撑,快速开发了此并联机器人的敞开式数字操控体系。
体系全体的规划
本课题所研讨的并联机器人的驱动由六个高精度的伺服电机及其驱动器承当,每一轴上都设有前限位、后限位及原点三个开关,共18个I/O量。电机驱动需求进行以方位反解为根底的轨道规划,使机器人的结尾执行器以必定的轨道准确抵达预订方位,并依据预先规划的轨道进行作业,因而,并联机器人的轨道规划和反解运算需求一个功用强壮的核算器进行核算和存储,并且这些存储的数据实时地传送到作为下位机的操控卡和驱动器上,以发生用于驱动电机的电流或电压。考虑到体系需求很多的数据传递、准确同步以及I/O信号品种多的特色,咱们首要挑选了PXI开发渠道,这是由于PXI不只具有业界最高的总线带宽和最低的传输推迟,并且供给从DC到6.6 GHz RF的各种模块化的I/O。为了习惯本体系进一步晋级和后续模块的嵌入,咱们挑选了高功用的8槽机箱。操控器则选用内嵌2.2GHz Intel 飞跃4处理器的PXI-8186以满意机器人轨道规划反解和数据分析的快速性。PXI-6511工业数字I/O接口板作为外围模块供给多达64路的阻隔数字输入。至于机器人操控体系的软硬件详细规划和选型,咱们将别离在下面逐个介绍。操控体系硬件之间的联系如图1.

图1.6-DOF并联机器人操控体系的各部分之间的联系
操控体系硬件规划
由于本并联机器人作为染色体切开配备体系的宏动子体系,肩负着除染色体终究切开以外的绝大部分使命,具有高的定位精度和大的作业空间要求。其根本组织是一6-PPPS解耦的空间六自由度并联组织,由六个高精度伺服电机驱动完结空间六维运动(X、Y、Z三个方向的移动和绕X、Y、Z三个方向的滚动),由于结尾渠道要抵达微米级精度和六个电机的和谐操控,所以咱们选用了NI公司功用杰出的PXI-7356多轴运动操控卡。此多轴运动操控卡的缓存断点技能有用的进步了积分速度,关于一般的方位断点可以以2kHz的速率核算触发点,关于等距分布点则可以以高达4MHz的速率核算;此卡的两轴PID操控周期可以抵达62.5μs,8轴PID操控周期可以抵达250μs,实时性远远高于一般试验操控1ms的要求,如此高的核算功率习惯了本体系的快速呼应的特性。PXI-7356多轴运动操控卡的多轴同步时刻小于一个采样周期;其方位精度较高,方位反应时方位差错不超越正负一个正交码盘计数(quadrature count),模拟量反应时使用其内置的8路16位模拟量输入收集功用,极大的进步了模数转化的分辨率,使其方位差错不超越一个最低有用位(LSB),如此高的精度为体系高精度的要求供给了很好的保证。别的,PXI-7356多轴运动操控卡本身的安全规范、S曲线调理功用、双PID操控环以及多轴之间的电子齿轮合作可以为体系供给牢靠的安稳性。PXI-7356多轴运动操控卡及其配套的运动操控接口UMI-7774端口板具有用来操控固态继电器和读取数字编/译码器的64位数字I/O,使得体系中比如18路限位、12路使能及很多的报警等信号读取和输出更为便利方便。鉴于以上考虑,咱们以为NI公司的PXI-7356多轴运动操控卡及其配套模块式合适本体系的要求,并选用。
操控体系软件规划
操控体系的杂乱性使得软件规划的进程中有必要进行合理有用的层面和模块区分。结合操控体系硬件和所要出现的功用,本软件区分为使用软件层、中心软件层和驱动软件层,每层依据功用要求又分为若干功用模块。如图2.
图2. 软件结构与信息传递
使用软件层:考虑到体系操作进程中需求运用一些开关来操控电机或抱闸、一些接口来改动各电机或压电陶瓷的运转参数、一些指示灯来宣布正常或报警信号、一些轨道曲线来实时监控各部分的运转状况以及各界面之间的切换等功用,咱们选用了最能表现虚拟仪器技能价值的LabVIEW图形化编程言语,编写了友爱、便利、灵敏的人机界面。程序的全体选用了主/从结构的编程办法,首要是为了处理多个不同频率的循环和循环之间的信息交互。程序中嵌入了并联机器人的反解模型及操控算法,选用全局变量、局部变量、同享变量等完结各程序模块之间及模块内部的信息交互,充分利用用户事情技能、告诉或行列技能完结各界面之间的切换,为了防止比如两个循环一起操作一个目标之类的竞赛问题,选用了同步技能。由于程序比较大,所要反映的信息多,因而在程序的管理上,咱们也充分利用了LabVIEW的高档编程技巧,如为了节约内存和明晰化程序结构及前面板,咱们选用了动态VI操控技能,不光完结了子VI的即用即调,并且完结了多面板程序规划的动态载入和界面重用。
中心软件层:面向机器人的轨道操控与I/O逻辑操控的程序调集,如回零点、接连运转、单轴调整、轨道曲线挑选、体系自检等。该层软件一方面担任完结机器人各关节驱动电机的准确同步运动操控,完结结尾执行器在操作空间中的准确轨道;另一方面,该层软件还需求完结一组通用I/O的输入输出操控,完结对组织运动的进程操控以及对外围设备的和谐操控等,以习惯杂乱的操控使命需求。
驱动软件层:驱动软件是完结单轴与多轴运动操控、D/A转化和硬件I/O操控的函数调集,包含轴装备、运动类型设置、电机运转和中止等操作函数。该层软件首要进行运动轴参数设置、电机加减速操控、起停操控、D/A转化和运动I/O的设置与操控等。该层的函数首要是操控板卡所带有的底层功用模块,可以用这些函数很便利的依据自己设定的操控计划编程完结上一级的中心操控软件层。LabVIEW图形化言语和LabVIEWRT、Control Design and Simulation Bundle、LabVIEWSystem identification toolkit, motion assistant等相关的NI工具包开发使用程序不光使得软件程序的开发功率大大进步,并且使得软件的功用完全、人机界面友爱。
体系全体特性与试验
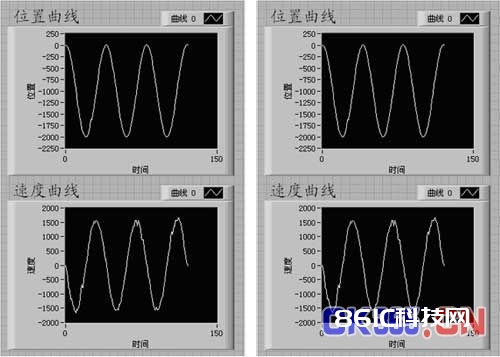
本计划是并联机器人操控体系规划范畴中一种新式的体系组成办法,其起点和落脚点是缩短开发周期、下降体系造价、进步体系特性、完善体系功用。依据LabVIEW和PXI渠道的6-DOF并联机器人敞开式数字操控体系不需求从最低层进行开发,只需对各个模块进行装备并编写出用户需求的特定功用程序即可,与以往的机器人操控体系的开发比较,不只大大缩短了开发周期,并且体系的晋级和保护也十分便利,在这个意义上来说此体系是性价比最高的。体系特性方面的优势首要表现在安稳性、快速性和准确性上,25KHz—25.6MHz的编码器反应信号滤波规模使得体系可以在强电搅扰的工业现场的安稳作业,6轴PID操控周期可以抵达250μs使得实时性远远高于一般操控操控体系1ms的要求,机器人六轴和谐运动后的结尾执行器稳态差错可达1μm表现了体系准确的特性。下图列出了几个典型的模块说明晰体系的一些技能特色和成熟的功用。图3是点动运转模块,该模块不只具有6个轴中每轴的单轴点动,并且依据机器人的构型特色和运动需求设置了任何两轴的双轴点动;该模块可以依据用户不同的运动需求设置点动步长、速度、加减速的基数值及其倍率;该模块可以实时显现运动的方位和运动完结状况,图示显现了轴1通过几个单轴点动完结后的状况。图4为轨道盯梢模块,该模块不只设置了预订轨道的盯梢也具有轨道规划的功用,并且可以一起显现六个轴的运转状况,图示为反映x向两轴同步运转的状况。图5为速度PID操控器参加前后同一余弦波的方位曲线运动所表现出的不同速度曲线特性,可见双PID操控器可以很大程度上改进其运动特性。图6为并联机器人全体体系。限于篇幅,此用于染色体切开设备的宏动并联机器人数控体系的其他特性不再逐个赘述。
总结
本文课题内容触及虚拟仪器技能、运动操控技能、机器人技能以及许多LabVIEW编程技巧,树立并完善了依据LabVIEW和PXI开发渠道的“六自由度并联机器人操控体系”,本体系具有高牢靠性、高精度、高运算速度、高智能化、友爱的人机交互才能等特色。独立展开了一系列运动操控研讨与使用软件编制作业,本体系首要特色如下:
(1)将虚拟仪器拓宽到并联机器人的自动操控范畴,充分利用LabVIEW图形化言语和LabVIEWRT, control design and Simulation Bundle、LabVIEWSystem identification Toolkit、Motion Assistant等相关的NI工具包开发使用程序,构成了一种依据模型的敞开式运动操控体系,不光使体系具有极好的人机交互性、直观性和完全的功用,并且缩短了开发周期,下降了开发本钱和硬件本钱,为机器人走向社会奠定了根底。

图3 点动运转模块
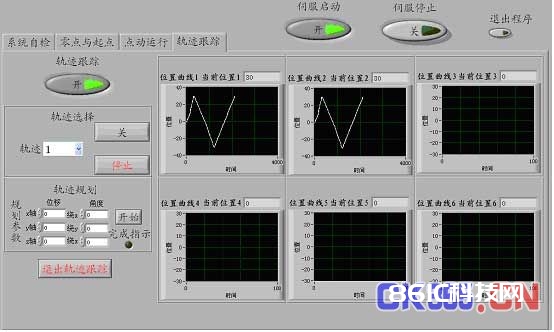
图4. 轨道盯梢模块
(a) (b)
图5 速度PI操控器参加前后的运动特性比较
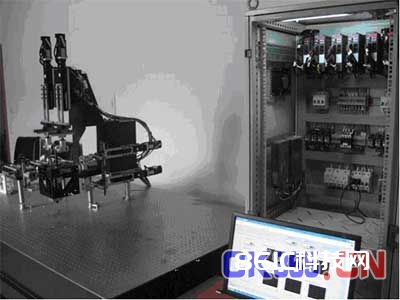
图6 并联机器人全体体系
(2)充分利用PXI-7356多轴运动操控卡的相关软件函数和模块,开发了高精度的并联机器人的多电机和谐操控和双电机同步操控。
(3)选用了用户事情技能、告诉或行列技能LabVIEW的高档编程技能,处理了各用户界面和各模块之间的实时切换;选用各种变量完结不同模块之间和相同模块内部的信息传递和同享;选用了VI的动态载入技能,完结了子VI的即调即用和多面板的动态载入及界面重用。
(4)充分利用LabVIEW强壮的外部接口才能,完结了动态链接库(DLL)和Windows API的调用,并嵌入了Matlab并联机器人运动操控程序,使程序不光具有Windows体系的复制、打印等功用,也使得杂乱的核算更为方便。






