


一、项目介绍
1、项目来历:
当移动机器人处在一个简略或杂乱、静态或动态、已知或不知道的环境中时,机器人的首要使命是感知环境,避开障碍物,然后以最小或较小的耗费(时刻、空间或许能量)完结自己的使命,这个进程的根底地点便是途径规划。所谓途径规划是指依照必定的功能指标,机器人怎么从所在的环境中查找到一条从初始方位开端的完结其本身意图最优或次优途径。途径规划是机器人研讨中的重要范畴,一般途径规划包含两个层面的意思:一个是关节机器人空间的途径规划;别的一个是移动机器人途径规划。前者具有较多的自由度,现在较多的应用于工业机器人中;而后者在近十年来的开展极为迅猛,其研讨内容也更为宽广。咱们选取后者作为研讨内容。
实践上,移动机器人的途径规划办法是根据不同的环境和详细的移动机器人操控体系结构的,在差异较大的环境中关于功能不同的移动机器人来说,不同的途径规划办法各有自己的优势与下风。现在还没有一种规划办法合适各种环境任何体系,而且有时候挑选不同的规划办法结合两边的长处能够获得更好的规划效果。
二、项目方案施行内容
- 剖析一般途径规划算法,了解规划需求;
- 对传统和智能机器人途径规划算法概括整合,并给出相应的程序;
- 经过环境建模办法,提出机器人途径规划仿真体系渠道规划办法,处理环境、机器人、障碍物、途径等收集与表明问题;
- 树立算法接口,用以将环境信息及途径规划算法进行输入输出;
- 完结机器人途径规划仿真渠道的规划;
经过制造智能车(AGV)什物,经过导航线(特别的途径规划),完结途径导航算法的测验。
三、预期效果及现阶段已获得的研讨效果
1、预期研讨效果:
- 对移动机器人途径规划算法进行研讨和剖析,为移动机器人体系开发供给根底;
- 改善或完结部分途径规划算法,并使用Matlab或MSRS等软件仿真;
- 规划并制造智能小车(AGV),规划导航线算法,进行什物验证,然后验证算法的可完结性;
- 树立环境模型、障碍物模型、机器人物理模型以及各种传感器模型,作为政策渠道的底层结构;
- 开宣布移动机器人途径规划仿真体系渠道;
- 编撰总结报告一篇,力求宣布两篇中心期刊论文;
2、现阶段已获得的研讨效果:
效果一:机器人途径规划算法部分
在2011年12月—2011年3月期间,咱们对不同的途径规划算法进行了研讨,而且使用Matlab软件对其进行编程仿真,而且咱们对仿真效果,进行了数据剖析和研讨,对不同的算法进行了比照,提出了各自的优缺点。
下面咱们选取几种现已做好的算法进行效果展现,分别为A*算法、人工势场算法等。而且咱们又进一步完结了避障及导航线循迹算法,为今后的研讨工作奠定了根底。
附录为A*算法的流程,关于其他算法的模型及流程,详见各开发文档。
1、A*算法matlab仿真效果
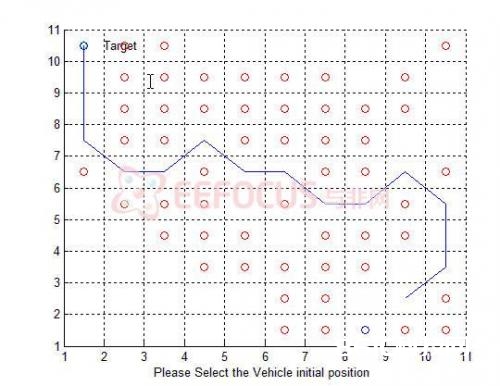
上图为选用A*算法的途径规划效果。图中赤色圆点表明障碍物,蓝色圆点表明起始点。由图能够看出,A*算法的规划效果比较好。
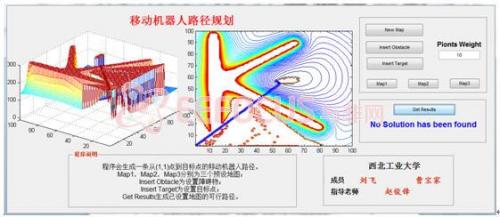
2、人工势场算法matlab仿真效果

人工势场法的基本原理便是在机器人所在离散环境中的每一点 赋一个势场值
赋一个势场值 ,
, 的值是方针点的引力和障碍物的斥力的叠加。
的值是方针点的引力和障碍物的斥力的叠加。
 和
和 是间隔影响因子,
是间隔影响因子, 为与方针的间隔,
为与方针的间隔, 为与障碍物的间隔。因而机器人的途径规划便是从起始点沿着势场最快下降的方向抵达方针点。
为与障碍物的间隔。因而机器人的途径规划便是从起始点沿着势场最快下降的方向抵达方针点。

人工势场受力模型图
该办法的长处是在数学描绘上简练,能够使机器人敏捷躲开突发障碍物,实时性好,因而经常被用于部分途径规划的规划。
可是人工势场法的缺点也比较多:
如下图所示,会发生过错的效果:
1、存在圈套区域:便是在途径规划中经常会碰到部分极值点,也便是引力和斥力持平,合力为零的点,然后使机器人运动到一个死区,导致规划失利。
2、当方针点邻近有障碍物时,智能机器人将永久也抵达不了意图地。在以往的一些研讨中,方针点和障碍物都离得很远,当机器人迫临方针点时,障碍物的斥力变的很小,乃至能够疏忽,机器人将只遭到吸引力的效果而直达方针。但在许多实践环境中,往往至少有一个障碍物与方针点离得很近,在这种情况下,在智能机器人迫临方针的一起,它也将向障碍物接近,因为引力场函数和斥力场函数的界说,斥力将比引力大得多,这样方针点将不是整个势场的大局最小点,因而智能机器人将或许达不到方针。
3、在障碍物密布的区域会发生震动,然后无法完结途径规划。
4、在接连狭隘的障碍物通道中摇摆,或是无法发现途径。
发生上述问题的原因是因为人工势场法把一切信息压缩为单个合力,这样就造成了把有关部分障碍物散布的有价值的信息扔掉掉的缺点。






