


PID操控是最早发展起来的操控战略之一,因为其算法简略、鲁棒性好和可靠性高,被广泛用于进程操控和运动操控中。数字PID操控算法是将模仿PID离散化得到,各参数有着显着的物理含义,调整便利,所以PID操控器很受工程技术人员的喜欢。
转台是检测和点评惯性导航与制导体系的首要测验设备。转台内装置的是力矩电机,因而抱负的转台的数学模型能够写成直流力矩电机的数学模型,PID操控器各操控环节的作用是这样的,份额操控(P操控)即时成份额地反响操控体系的差错信号e(t),积分操控(I操控)首要用于消除静差,微分操控(D操控)反响差错信号的改变趋势(改变速率)。份额操控是对现在差错的一种校对,积分操控是对过去差错的校对,而微分操控是对将来或许的差错的校对。下面结合转台的操控进程对数字PID操控及其改善算法作详细的评论。
1 Simulink仿真
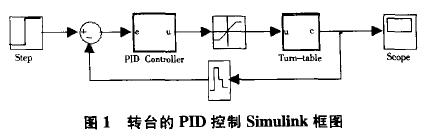
转台的PID操控的Simulink仿真框图如图1所示。其间包含了两个子体系PID Controller(PID操控器)和Turn-table(转台)。对抱负模型进行Simulink仿真试验。选用不同参数的PID操控器,它们对幅值为0.2的参阅输入的阶越呼应的进程曲线如图2所示。图中实线为只选用份额操控,取Kp=1;点画线、虚线和粗线均为选用份额微分操控,点画线的KI=1,KD=200;虚线的Kp=1,KD=600;粗线的Kp=10,KD=1000;图中点线为PID操控,Kp=1,KI=0.0005,KD=200。
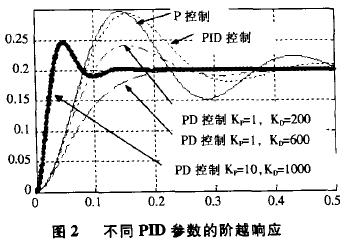
剖析图2可得出:
① 关于抱负的数学模型,不需要积分操控项,只选用PD操控就够了。因为积分操控项的意图仅仅消除静差,所以在体系没有静差的情况下不要参加积分操控环节,因为积分操控环节会恶化进程动态特性,形成过大的超调量,并添加了调整时刻;
② 不要忽视微分操控环节。要减小上升时刻,添加体系的操控刚度,必定要求添加Kp,但过大的Kp会发生过大的超调,乃至使体系振动,但添加Kp的一起只需添加KD一般都能够减小超调,取得较好的动态特性。能够这么说,抱负的数学模型,选用大参数的PD操控能够取得足够好的操控功能。但也不是说能够一味的添加KP和KD的值,因为KP值越大,操控量u也越大,耗费的能量也越多,并且u受饱满约束。
运用PD操控在实践转台体系中时,有较大的稳态输出差错,并且输出动摇较大。剖析原因如下:
① 因为功率扩大器有较大的死区,并且转台的机械体系存在有静摩 擦力,使实践的被控体系有较大死区。所以操控器假如没有积分环节,稳态输出有较大的静差;
②实践的被控体系总是会遭到许多搅扰,包含各种不确定的体系噪声和量测噪声。过大的KD会扩大噪声,使体系的输出动摇较大。






