


PID:Proportional Integral Derivative,份额、积分、微分操控。PID 操控器是实践工业操控进程中使用最广泛、最成功的一种操控办法。对差错信号e(t) 进行份额、积分和微分运算改换后构成的一种操控规则。份额、积分、微分效果可依据需求进行不同组合,如 P 操控、PI 操控、PD 操控、PID 操控。在工业出产进程中,PID 操控算法占85% ~ 90%。PID 操控技能原理简略,使用方便,它适应性强,能够广泛使用于化工、热工、冶金、炼油以及造纸、建材等各种出产部门,并且鲁棒性强,即其操控品质对被控方针特性的改动不大灵敏,对模型依靠少,按 PID 操控进行作业的主动调理器早已商品化。
1 PID 操控的原理和特色
PID 操控, 又称PID 调理。当咱们不完全了解一个体系和被控方针,或不能通过有用的丈量手法来取得体系参数时,最适合用PID操控技能。PID 操控, 实践中也有PI 和PD操控。PID 是一种线性操控器, 它依据给定值rin(t) 与实践输出值yout(t) 构成操控计划:
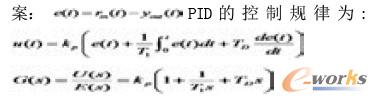

PID 操控器便是依据体系的差错,使用份额、积分、微分计算出操控量进行操控的。 PID 操控器各校对环节的效果是:份额环节,成份额地反映操控体系的差错信号e(t),差错一旦产生,操控器当即产生操控效果,以减小差错;积分环节:首要用于消除静差,进步体系的无差度。积分效果的强弱取决于积分时刻常数T,T 越大,积分效果越弱,反之则越强;微分环节,反映差错信号的改动趋势,并能在差错信号变得太大之前,在体系中引进一个有用的前期批改信号,然后加速体系的动作速度,削减调理时刻。

图(1)PID 操控的结构
在进程操控中,绝大部分都选用 PID 操控。破例的状况有两种。一种是被控方针易于操控而操控要求又不高的,能够选用更简略的开关操控办法。另一种是被控方针特别难以操控而操控要求又特别高的状况,这时假如 PID 操控难以到达出产要求就要考虑选用更先进的操控办法。
2 P /I/ D 参数的预置研讨
份额增益 。变频器的 PID 功用是使用方针信号和反应信号的差值来调理输出频率的,一方面,咱们期望方针信号和反应信号无限挨近,即差值很小,然后满意调理的精度:另一方面,咱们又期望调理信号具有必定的起伏,以确保调理的灵敏度。处理这一对立的办法便是事先将差值信号进行扩大。份额增益 P 便是用来设置差值信号的扩大系数的。任何一种变频器的参数P 都给出一个可设置的数值规模,一般在初度调试时,P可按中心偏大值预置.或许暂时默许出厂值,待设备工作时再按实践状况细调。
积分时刻。份额增益 P 越大,调理灵敏度越高,但因为传动体系和操控电路都有惯性,调理成果到达最佳值时不能当即中止,导致“超调”,然后反过来调整,再次超调,构成振动。为此引进积分环节I,其效果是,使通过份额增益P 扩大后的差值信号在积分时刻内逐步增大 或减小,然后减缓其改动速度,避免振动。但积分时刻I 太长,又会当反应信号急剧改动时,被控物理量难以敏捷康复。因而,I 的取值与拖动体系的时刻常数有关:拖动体系的时刻常数较小时,积分时刻应短些;拖动体系的时刻常数较大时,积分时刻应长些。
微分时刻。微分时刻D 是依据差值信号改动的速率,提早给出一个相应的调理动作,然后缩短了调理时刻,战胜因积分时刻过长而使康复滞后的缺点。D 的取值也与拖动体系的时刻常数有关:拖动体系的时刻常数较小时,微分时刻应短些;反之,拖动体系的时刻常数较大时, 微分时刻应长些。P/I/D 参数的预置是相得益彰的,运转现场应依据实践状况进行如下细调:被控物理量在方针值邻近振动,首要加大积分时刻 I,如仍有振动,可适当减小份额增益P。被控物理量在产生改动后难以康复,首要加大份额增益 P,假如康复仍较缓慢,可适当减小积分时刻 I,还可加大微分时刻 D。
3 PID 操控在烟草出产中的使用
现在的PID 操控在烟草行业的使用大部分是多闭环操控,处理了料头料尾及出产进程中内涵质量的不安稳现象,把外界搅扰要素对出产所形成的影响降到最低。在出产进程中,因为来自外界的各种扰动不断产生,要想到达现场操控方针值坚持安稳的意图,操控效果就必须不断的进行。若扰动呈现使得现场操控方针值产生改动,现场检测元件就会将这种改动记载并传送给PID 操控器,改动进程变量值,经变送器送至PID 操控器的输入端,并与其给定值进行比较得到差错值,调理器按此差错并以咱们预先设定的整定参数操控规则宣布操控信号,去改动调理器的开度,使调理器的开度添加或削减,然后使现场操控方针值产生改动,并趋向于给定值,以到达操控意图。这儿首要以制丝出产线RCC 回潮机为例,侧重介绍现在PID 操控在烟草行业中的使用。RCC 的出口水份怎么操控呢,RCC 的功用是在必定的温度下,依据要求对烟丝进行再回潮,回潮后的烟丝水份便是烘丝体系HXD 进口烟丝的水份,这个水份的安稳性怎么将直接影响HXD 的出口水份,所以操控好RCC 出口水份,是HXD 出口水份安稳的条件。
RCC 的加水PID 操控是先依据公式算出初始的加水量L0, 其公式是:L0= 烟丝流量*[(100-入料水份设定值)/(100 – 出口水份设定值 +喷发蒸汽含水率)]- 烟丝流量
当RCC 出口的水分仪检测到烟丝实践水份与出口水份设定值有差错时,操控器输入端对差错值通过对L0 进行批改,批改值为L1, 即进程加水量的设定值为L=L0+L1。而PID 操控器依据由流量变送器传来的实践流量值,宣布操控信号去调理气动阀的开度,处理了现场扰动要素,确保实践加水量趋向于进程加水量的设定值,然后确保了烟丝出口水分的安稳性。
跟着社会的开展,人们对烟草质量的要求越来越高,需求量也是越来越大,社会对烟草企业的开展要求也是越来越高。操控卷烟产品感官质量的安稳性,不只要在质料上确保配方的准确性,并且要确保加工进程工艺参数的安稳。烟草出产线上选用了很多的PID 参加操控,在安全、节能、环保、安稳出产、改进劳动条件、进步产品的产、质量等方面都有非常重要的效果。






