


1 导言
跟着人们对不干胶商标印刷功率和精度要求的进步,间歇式轮转机已经成为不干胶商标印刷机的一个发展趋势。它比较卫星型和叠层式印刷机具有更快的印刷速度、更能节约印刷资料等特色。现在,各大企业的印刷不干胶商标的间歇式轮转机首要依托进口,其价格昂贵,操作和修理都不行便利。国内一些公司也正在致力于自主开发,可是就现在状况而言,仍是不能彻底到达不干胶商标间歇式轮转印刷机的操控要求,体现在套准精度不行,加减速时走位。这首要是因为在印刷进程中,印刷轴之间不能够准确同步以及跟着印刷速度和卷筒纸巨细的改动,印刷纸张的张力改动而引起的。为_r处理这一问题,咱们研发了依据多轴运动操控器的间歇式轮转印刷机操控体系。
2 间歇式轮转机作业原理及进程
2.1 间歇式轮转机作业原理
高功用不干胶商标间歇式轮转机一般选用无轴结构,即没有传动轴,印刷轴和拖料轴有各自的电机驱动。它首要由放纸机、拖料轴(包含拉纸轴和送纸轴)、印刷轴、收纸机组成,其结构原理图,如图1所示。
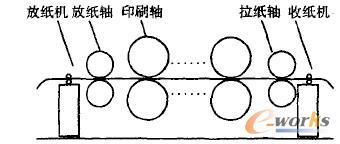

图1间歇式轮转机结构原理图
2.2 不干胶商标间歇式轮转机作业进程
间歇式轮转机的首要运动方式是间歇运动。在—个印刷周期内,其动作进程,如图2所示。印刷轴向同一方向匀速旋转,当印刷版触摸印刷资料时,拉纸轴、送纸轴和印刷轴坚持同步(瞬时相线速度为零),开端印刷。在印刷进程中,这三轴一向坚持同步。当印刷版脱离印刷资料时,印刷结束。此刻,拉纸轴、送纸轴先减速为零,中止运动一段时刻,再反向旋转,当印刷轴旋转到印刷版再次触摸印刷资料时,就进入了第二个印刷周期了。
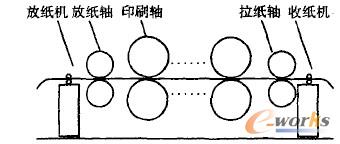
图2轮转机各轴动作联系
3操控体系规划
3.1 体系硬件规划
3.1.1 运动操控器
操控体系的运动操控器选用英国Trio公司的Eur0209,它是一款欧式结构的数字运动操控器,以用于数据实时处理的高功用DSP为内核,发生16位分辨率的IOV速度给定信号,集成了容量为1M byte的存储器,一个以太网接门,一个RS232接Ll,还有16路24V输入、8路24V输出、2路12位分辨率的(0.10)V模拟量输入,以及一个24V/lOOmA的看门狗继电器输出。该操控器能够操控l到8个轴的伺服或步进。可独立脱机运转,支撑多任务程序(最多答应7个程序按优先等级一起运转)。
3.1.2 触摸屏
运用触摸屏能够树立友爱的人机界面,在触摸屏上能够完结产品计数,设置吲乍犊式(手动或主动),设置湿示印刷版长和印刷速度,在线调整张力,反常报警等功用。考虑到功用、价格,选用威纶MT506触摸屏,自带的EasyBuilder500组态软件简略易用又功用强壮。
3.1.3伺服电机
依据功率和转速要求,选用日本安川Σ-II系列SGMGH伺服电机。—共8个f硼匣电机,其间6个衔接印刷轴,2个衔接拖料轴。
3.2 体系软件规划
3.2.1 多轴同步操控
多色轮转印刷机要求各种色彩印刷轴之间坚持同步运转。传统轮转印刷机经过选用机械长轴传递运动到各印刷轴来坚持同步,其精度和功率都受机械传动装置限制。运用电子虚拟轴功用。能够战胜以上缺陷,完结无需机械传动轴的无轴同步运转。Eur0209运动操控器除了最多可操控的8个物理轴以外,别的还支撑2个电子虚拟轴功用。经过ADDAX指令把电子虚拟轴的运动叠加到各印刷轴,再进行方位补偿,就完结了各种色彩印刷轴之间同步运转。
3.2.2 恒张力操控
在印刷进程中,纸张有必要具有必定的张力。可是张力不稳会引起套印禁绝、重影乃至纵向皱褶。恒张力操控也是经过Eur0209的另一个电子虚拟轴和ADDAX指令来完结的。其首要原理足操控拉纸轴和送纸轴的相位差,也就是在拉纸轴和送纸轴同步的基础上,进行一个方位补偿。在线调整这个方位补偿量,直到套印差错在答应规模内。最终把补偿量用变量保存下来。在印刷进程中及时的调用这个方位补偿量就到达了恒张力操控的意图。
3.2.3 各轴和谐动作
间歇式轮转印刷机要求拉纸轴、送纸轴在每个印刷周期(印刷轴旋转一圈的时刻)中完结一次正反滚动作循环,并在正向滚动和与主轴同步中完结印刷动作。在Eur0209运动操控器中,整个进程能够由MOVELINK指令来完结。
3.2.4 带前馈的PID操控
本操控体系选用带前馈的PID操控战略,把前馈操控和反应操控结合起来,这种操控战略既具有前馈操控及时的特色,又能够补偿多个扰动引起的差错。其结构,如图3所示。
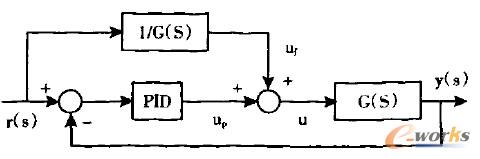
图3带前馈PID操控结构
在多轴运动操控器Eur0209中,经过轴参数P_GAIN、I_GAIN、D_GAIN和VFF_GAIN来完结带前馈PID操控。
4 试验结果与剖析
将体系中的Eum209运动操控器经过以太网接口与Pc机衔接后,就能够对该体系进行现场在线调试。选用Motion Perfect2自带的软件示波器来追寻轴以及运动的参数。运用轴参数窗口来监督,改动操控器上轴的运动参数。轴参数P_GAIN、I_GAIN、D_GAIN和VFF_GAIN影响着操控体系功用,这四个参数之间也相互影响。安稳不跑位是对不干胶商标印刷机最基本的要求,轴参数P_GAIN和VFF—cAIN对其影响最为明湿。为了简化试验过程,在轴参数I_GAIN和D—GAIN为定值的状况下,经过调理参数P_GAIN和VFF_GAIN来进行研讨。
该操控体系的准确性用随动差错FE来评价。当印刷轴转速为33.6r/rain,软件示波器采样周期为500res,轴参数I_GAIN=0.01,D—GAIN=0.02时,研讨轴参数P_GAIN、VFF_GAIN对随动差错FE的影响,其试验数据,如表1所示。
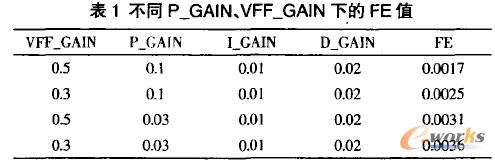
明显,跟着轴参数P_GAIN和VFF_GAIN值的削减,随动差错FE逐步增大。假如FE大于FE—LIMIT设定值,轴状态参数显现犯错,一起操控卡宣布警报。表1中,P_GAIN=0.03,VFF_GAIN:=0.3,随动差错FE=.0036,没有超越不干胶印刷答应的差错规模。体系的安稳性直接影响到印刷套位的安稳性,能够用示波器输出波形滑润度和重合度(印刷主轴和拖料轴输出波形重合程度)来衡量。在平等试验条件下,轴参数P_GAIN和VFF.GAIN对示波器波形影响(图略)。当P_GAIN=0.03,VFF_GAIN=0.3时印刷轴和拖料轴电机输出波形重合部分最滑润,此刻波形最好。经过印刷试验证明,印刷机作业最安稳,不容易呈现跑位。
5 定论
提出了依据Eur0209运动操控器的间歇式轮转印刷机操控体系,运用Eum209运动操控器的强壮功用,完结了各印刷轴之间的独立操控运转,比较传统的不于胶有轴印刷机,简化了机械部分,进步印刷精度。完结了集成化和智能化操控。该体系印刷速度每小时最高可到达1 2000印次,最多能印刷八种色彩商标,套印差错在0.03mm内,加减速不走位,已到达不干胶印刷的工业操控要求。






