


多声源定位技能因其在智能机器人以及视频会议等的广泛使用而日益成为研讨的热门。根据麦克风阵列的多声源定位是指选用麦克风阵列接纳声响信号,经过对收集到的多路信号进行剖析及处理,并结合麦克风的几许联系终究得出多个声源的坐标。规划了多声源数据收集体系仿真及试验渠道。
计算机编程言语中,VisualBasic 6.0 是Microsoft 公司推出的面向对象的可视化开发编程东西, 具有丰厚的数据类型和结构化程序结构,开发效率高,界面制造漂亮便利等长处,且使用日益广泛,故Visual Basic 6.0 言语做到了实在的面向对象编程。此外,在数据收集和数据处理的体系中,PC机软件资源丰厚,人际交互便利等长处。以PC 机作为试验渠道,能实时快速的完成数据的收集及处理等。此外,试验渠道能完成多声源数据的一起收集,因而本规划收集到的数据可以很好的使用于多声源定位的算法研讨中。
1 体系仿真的原理、组成及试验渠道建立
1.1 体系仿真中的麦克风阵列结构及信号模型
L 型麦克风阵列数学模型如图1 所示:
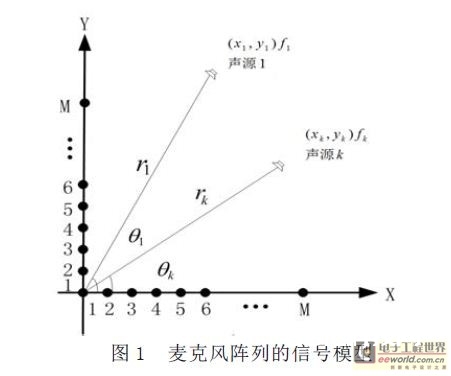
上图中的为声源的方位, 为声源的中心频率,为声源与轴连线的夹角, 为声源到坐标原点的间隔。L型麦克风阵列由X 轴和Y 轴上阵元个数均为M 的均匀线阵X,Y 构成,阵元间的间隔为D,均小于信号波长的四分之一,阵列输出的噪声为均值为零,方差为的计算独立的高斯白噪声,和信号源不相关。
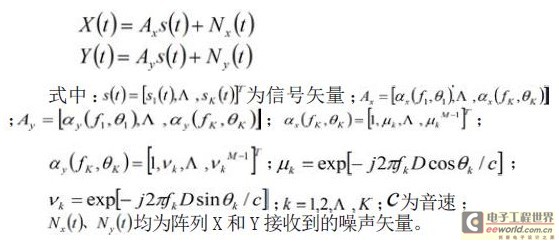
设平面内有K 个独立的信号源发射到此阵列上,以坐标原点处阵元为参阅阵元,则阵列X、Y 接纳到的信号矢量别离为:
1.2 体系仿真成果
仿真界面首要包含:多个声源方位,波形,幅值,相位及频率的设置;坐标轴的横、纵坐标规模均为0-10 米;麦克风阵列的几许方位;采样频率;A/D 转化;收集数据集、声源及麦克风增加信息的保存途径等。
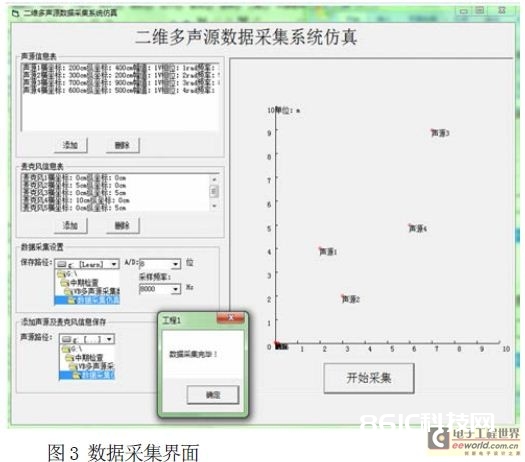
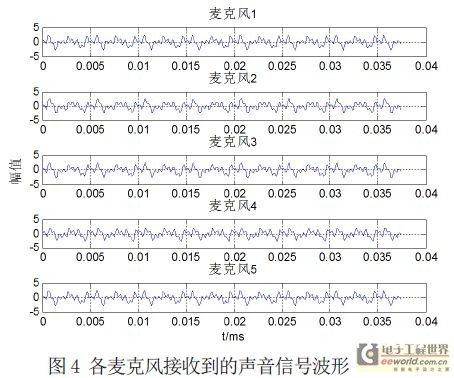
图3 显现增加的声源及麦克风的信息,各麦克风得到的声响信号波形如图4 所示:
仿真终究要使用在实践中,仿真中选用的信号频率规模为声源信号的规模[20,20000]Hz,起伏规模为[0,1]V,采样频率取值别离设置为8000Hz、90000Hz,A/D 转化等。
2 试验渠道建立
多声源数据收集体系框图如图5 所示,首要包含:PC 机、外扩声卡、麦克风阵列。
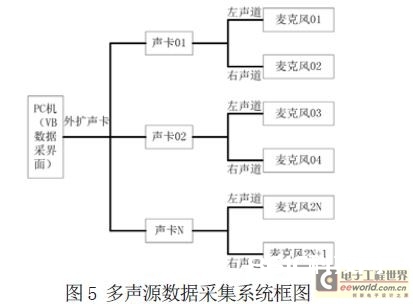
试验渠道建立意图确保了各麦克风阵元是一起开端收集声源信号,即确保了收集时刻零点的同步,详细建立进程如下:①声源挑选单频率正弦波信号, 用圆形的扬声器进行播映满意了点声源的要求。② PC 机顶用VB 编写数据收集的操控界面用来操控信号收集的开端和完毕。③一台PC 机可外扩多个声卡,每个声卡的左右声道别离接两个麦克风,即每个声卡可一起收集两路信号。④麦克风放置成L 型,相邻两阵元之间的间隔为5cm,装置时确保阵列和声源在同一个水平面上。
声源的规划:选用圆形的扬声器作为试验的声源点,其长处在于扬声器宣布的声响信号是以圆形向四周传达开来,确保每个麦克风阵元接纳到的声响信号都是相同的。麦克风阵列的规划:为进步阵列的分辨率,相邻两阵元间隔不大于接纳声源信号波长的四分之一。选用具有高灵敏度、全指向性、低阻抗的驻极体受话器。
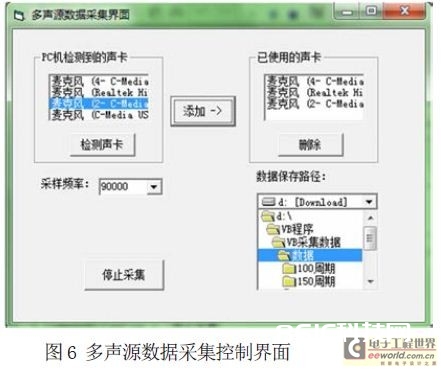
多声源数据收集VB 操控界面如图6 所示,首要检测PC 机上的声卡设置,选中所需要用的声卡设备,设置好采样频率和数据的保存途径,点击开端收集,即可得到实在环境中的声源信号。
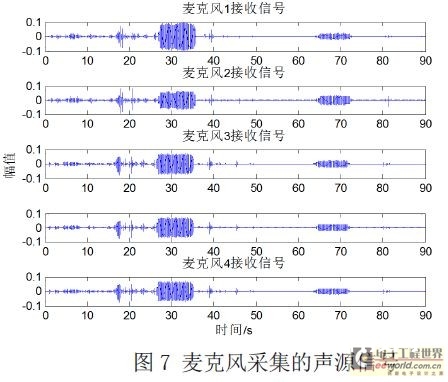
麦克风1、2、3、4、5 收集到的信号波形如图7 所示:
3 总结
本文完成了多声源数据收集系统仿真及硬件渠道的建立,体系仿真界面可视化好。硬件中PC 机存储、处理数据速度快,实时性好。这种试验规划首要处理了各路信号收集时刻零点同步的问题,避免了收集进程中存在的时刻差对多声源定位算法的研讨。此仿真体系可使用于对数据一起收集及采样频率等要求较高的当地。






