


1导言
机器人巡线是指用机器人带着检测通讯仪器沿 全线路跋涉作业,并由机器人完结对线路运转毛病的检测和对安全事故隐患的巡视,并将所检测的信息实时向地上传送,由地上进行剖析处理。在惯例地上运作时,一般选用小型蓄电池守时替换方法。可是,高压输电线路散布在野外,跨过山川湖泊,巡线机器人作业时,能量消耗大,而现场没有可供充电的电源,而且在巡线过程中频频的替换蓄电池会形成诸多不便,该要素会极大的约束巡线机器人的广泛应用。
为此,本文研讨了经过感应取电的方法为机器人供应电源的供电体系。
2 体系结构
为完结上述意图,规划铁芯和线圈从高压线路上获取电能,获取的电能经过开关电源转换为稳流源,并经过充电使能电路向镍氢电池充电,一起,充电操控电路对电池电压监控以操控充电方法、是否充电、是否停机,并将信息传送给巡线机器人主操控体系。
3作业原理
依照电磁场理论,盘绕作业状况的高压输电线 路存在着交变磁场,依据电磁感应规律,磁场中的回路将发生感应电流。在近似以为输电线路为无限长的前提下,输电线路所发生的磁场的磁通线为环绕它的同心圆。如,输电线路中的电流为I1,依据安培环路定理能够推出距输电线间隔为r的空间任一点磁场强度的巨细为: H=I/2 πr(A/m)(1)
磁感应强度为: B=μI/2πr(T)(2)
B的方面与中心坐落导线上的圆相切,并笔直 于导线的平面。 假如将机器人等为一个电阻R,则由感应线圈与机器人组成的回路中将发生电流I2,等效图见图1。
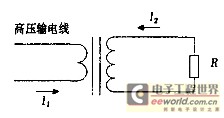
图1取电设备电路等效图
机器人电源体系研讨的中心内容是怎么高效率 地从输电线路四周的磁场能量转换为电能,其间要害部分是铁芯和线圈的规划。
4电源体系的构成
4.1铁芯及线圈
铁芯的特性及身体尺度对感应设备输出功率的影响很大,如图2所示,高压输电线路可视为只要一匝的初始绕组,按电磁感应规律,R两头的感应电动势的有效值为:
疏忽励磁电流,I1与流经R的电流I2满意I1≈ NI2,按感应电流核算,R的功率为:
由式(4)可知,因为受机器人体积的约束,在S必定的情况下,应挑选适宜的铁芯资料以进步磁感应强度是进步输出功率的途径。 高压输电线路中的电流受负载的影响而不断改变,峰值电流是谷值电流的数百倍。在如此大的改变规模之内,为确保能为机器人接连供电,取电设备有必要在较小的电流时便能获得较高的能量,而且跟着电流不断添加而增大。对应于铁芯,则要求其应具有较高的初始磁导率及较高的饱满磁感应强度。在现在运用的软磁资猜中,因为硅钢片具有较大的饱满磁感应强度及叠片系数,能获得较大的功率,故取其作为铁芯资料。
为了防止磁场损耗,铁芯应是一个全体,以确保磁路中无气隙。但因为高压输电线路无断点,一起,机器人在跋涉过程中需悬垂子、平衡锤等妨碍。铁芯有必要规划成能够分合的两部分,在正常作业时两部分合为一体,跨过妨碍时需经过机械手将其分隔。
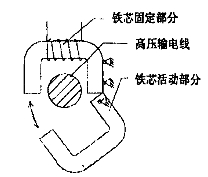
图2 铁芯结构示意图
从式(1)、 (2)中相同可知,取电设备所取功率一起受线圈匝数的影响。取能设备若要获得最大能量,则P1及P2应一起到达最大值,此刻应满意P1=P2,由此可推出
此刻,取电设备能获得最大功率。此联系是在疏忽漏磁、气隙、励磁电流的情况下推出的,为了验证其准确性,咱们独自对线圈匝数进行了实验。实验时,输电线路电流I1=210A,此刻,依据硅钢的磁 化曲线可查得,B≈1.8T,负载等效电阻R=800 Ω,电流频率f=50Hz,理论核算值为N=738。实验数据见表1。
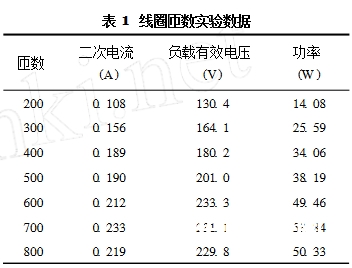
能够看出,在700匝左右时,功率到达最大值,与理论值附近。
4.2充电及操控电路
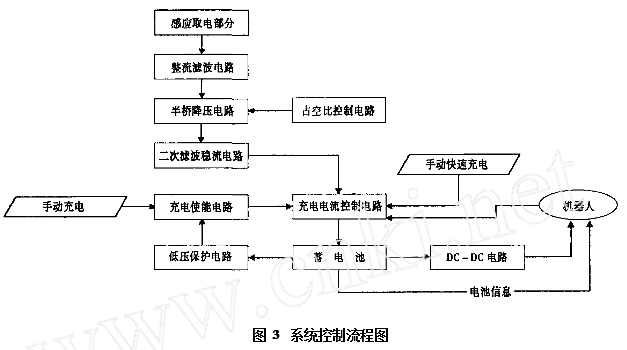
铁芯和线圈从高压线路上获取的电能经过开关电源转换为稳流源,并经过充电使能电路向镍氢电池充电,一起,充电操控电路对电池电压监控以操控充电方法、是否充电、是否停机,并将信息传送给巡线机器人主操控体系,图3是体系操控流程图。
4.2.1开关电源电路
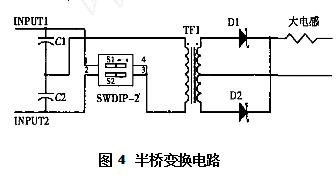
开关电源中选用半桥改换电路进行降压,如图4所示。为便利阐明,场效应管的开关操控用两个开关替代(swdip22),开关S1和S2替换导通,当S1导通时,S2断开,然后反之。稳态条件下,在C1= C2时,S1导通时,C1上的1/2VS加在原边线圈上, 副边绕组电压使D2导通。经占空比所守时刻后,S1关断,S2导通,副边绕组电压使D1导通。场效应管的开关操控是由KA7500B芯片9,10,12脚来操控的,操控电路运用变压器耦合,驱动MOSFET,驱动BG3、BG4和BG7、BG8组成了桥式推挽功率放大电路。经过9脚输出高电平时,10脚为低电平,BG4、BG7导通。变压器TF1流过正向电流。变压器TF1一次绕组上的电压为反向,巨细为从整流桥过来的总电压的一半,如图5所示。
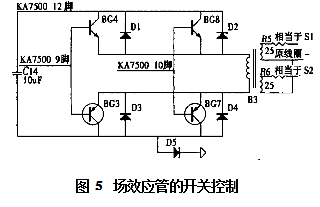
10脚输出高电平时,9脚为低电平,BG8、BG3 导通。变压器TF1流过反向电流。变压器TF1一 次绕组上的电压为正向,巨细相同为从整流桥过来的总电压的一半。
4.2.2充电操控电路
规划的充电电路须在电压至峰值电压时,中止 充电,以防电池过充电;而且在充电快完结时,应运用C/102C/15进行弥补充电,以防止因为电池的弱极化。 充电使能电路如图6所示,SR24是继电器,CTL+,CTL-连接到线圈的输出端,78L15为运放供应安稳的15V电源。使能电路的中心是CA3140,本电路不能选用开环比较器电路,因为,镍 氢电池在充电时也要作业,其 dv dt 的特性或许改变很大,ca3140接成schmitt触发器的方式。
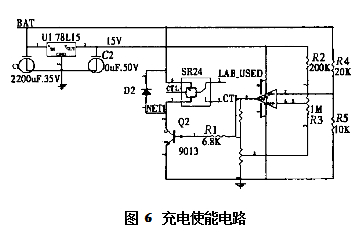
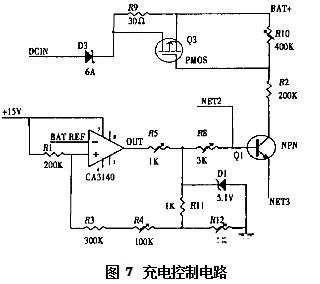
图7是充电操控电路,由CA3140组成schmitt 触发器,稳压管的首要效果是安稳输出电压的幅值,为三极管供应适宜作业点。R5是维护电阻,起限流效果。两个光隔,别离用于强制快充使能端和快速充电检测,为机器人供应充电信息。
机器人过障时电机供应的功率较大,充电电流或许小于放电电流,为防止电池的过放电而损坏电池,规划的维护电路,如图8所示。
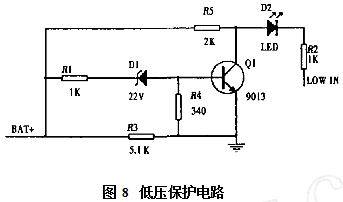
当蓄电池两头电压低于24V时,因为稳压管的 非线性,三级管Q1基极的电位趋于0,Q1反相截止,电流经R5,D2流入光隔D3,发生LOW信号,提示机器人停机充电。当蓄电池电压高于24V时,则Q1导通,电流由R5流入三极管Q1。
机器人需求输出32V,7A;24V,4A;12V,3A;5V,2A四路电压,选用DC/DC模块电源,把电池输 出端的电压转换成以上四种电压。
5定论
本文对机器人电源体系进行了理论剖析和实践规划,首要论述了感应取电设备各参数(铁芯磁性参数、几许尺度、线圈匝数等)对取电功率的影响,从理论上推出他们之间的联系,依据理论剖析成果,进行了相应的实验;一起,对电源体系的操控电路及充电电路作业原理进行具体的介绍。本体系研发,关于高压作业设备的电能供应问题,是一个很好的 解决方案。






