


为完结高速公路车辆超宽超高管理作业的自动化、智能化,规划了一种根据激光脉冲测距技能的智能车辆宽高检测体系。体系选用LMS二维激光测距传感器,在新式高功用微处理器的操控下,对车辆概括进行高速动态扫描,将所接纳到的实时数据进行剖析处理,完结对跋涉车辆的宽高检测和超限声光报警。试验结果表明,体系丈量精度为±0.15m,丈量准确率到达95%,体系功用满意高速公路管理部门关于车辆宽高超限检。
硬件电路
智能车辆宽高检测体系电气操控部分以根据ARMCortex-M3内核的LM3S8962处理器作为操控中心,按功用可划分为以下模块:电源模块,主操控器模块、时钟模块、数据通讯模块、键盘输入模块、液晶显现模块、继电器操控模块等,以下对3个部分作较具体介绍。
主操控器电路模块
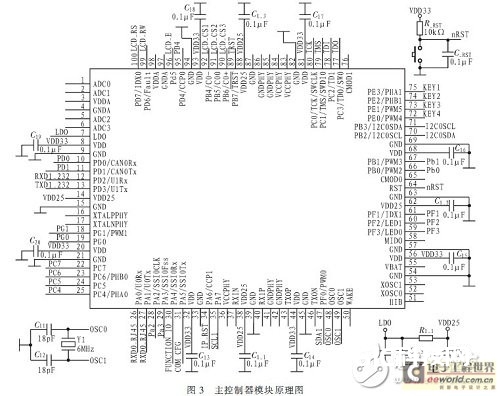
选用ARM Cortex-M3内核的微操控器LM3S8962作为体系操控中心。Cortex-M3内核选用ARMv7-M架构,它紧凑地结合Thumb-2指令集,选用哈佛处理器架构,与ARM7TDMI比较,比Thumb指令每兆赫的功率进步了70%,比ARM指令进步35%。因为Thumb-2指令是 Thumb指令的扩展,16位和32位指令共存于同一形式下,复杂性大幅下降,代码密度和功用均得到进步。LM3S8962时钟频率高达50 Hz,多达36个中止源具有8个优先等级,供给体系时钟,256 kB的FALSH,64 kB的SRAM,休眠模块,通用异步收发器,通用定时器,PC接口以及其他丰厚的外设接口,可便利的对各种现场设备进行有用操控。图3为LM3S8962 的外设接口及其外围电路(时钟、复位、UART接口等)。
数据通讯电路模块
将激光传感器扫描得到的极值坐标信号经过通用异步收发器(UART)传送给微操控器,选用了MAX232进行RS232电平转化,如图4所示。
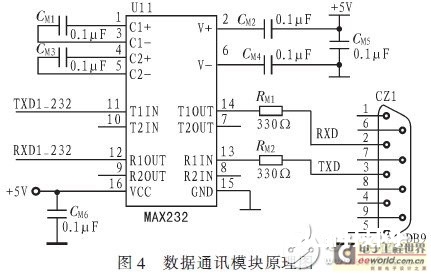
LM3S8962具有两个串行接口UART0和UART1。本体系选用UART1用于RS232通讯运用。UART是一种使用广泛的短距离串行传输接口,通讯两边只需选用相同的帧格局和波特率,仅用两根信号线(Rx和Tx)就能够完结通讯进程,有独立的发送FIFO和接纳FIFO。有可编程的波特率发生器,答应速率高达460.8 kb/s。体系中经过UART传送的数据高速存储于SRAM存储器内供微操控器进行实时快速核算。
输入输出电路模块
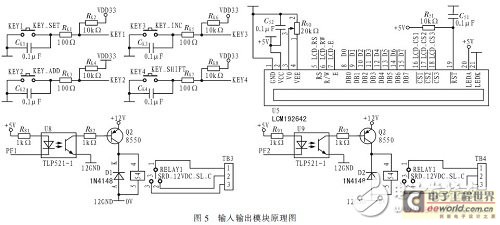
体系设置了4个按键,用于设置车辆的限宽限高值,设置及修正体系时刻等,完结了随时修正信息的功用。为了便于作业人员检查过往车辆的宽度和高度,选用了 LCD显现。选用青云立异公司出产的LCD液晶显现模块LCM192642,它是汉字图形点阵液晶显现模块,可显现汉字和图形。模块作业电源为5 V;改动变位器W1的值能够调理LCD屏的显现对比度;整个LCD屏被均分为三部分16~18是选屏信号线,能够挑选其间任一部分显现。体系中设置了2个 12V继电器,当跋涉车辆经检铡超过了规范的宽度和高度时体系会经过继电器别离接通警灯和室外扩音器的电源而发生声光报警,一方面提示现场作业人员进行处理,另一方面奉告司机该车超限需泊车承受处理。如下图5所示为输入输出模块原理图。
针对高速公路车辆超限超载这一问题,规划了根据激光测距技能的宽高检测体系,可完结对跋涉车辆进行实时动态丈量。本体系在试验期间,作业牢靠安稳,功耗低,核算速度快,丈量精度高,抗干扰能力强,试验差错契合高速公路管理部门关于跋涉车辆宽高超限检测的要求。经过重复试验验证,该规划有用可行,为下一阶段进入现场进行实地调试作了充分准备。






