车牌辨认的运用远景
依据核算机图象处理和字符辨认技能的车牌主动辨认技能,有着极端宽广的推行运用远景。
1、车牌辨认技能在当地上的运用
依据核算机数字辨认技能的车牌主动辨认技能,在收费站、泊车场、加油站和居民小区、高档宾馆、饭馆收支口等场所,有着极端宽广的推行运用远景,能够完结车辆的主动监控、主动挂号、主动查询等功能,也能够用于集装箱,货运列车的主动抄号等。
用于高速公路收费办理:一旦车牌主动辨认技能到了实用阶段,它能够首要推行运用到高速公路收费站办理。它能够使高速公路行进的车辆不用泊车而完结收费办理。
用于城市交通车辆办理:车牌主动辨认技能还能够与轿车的外形、色彩等参数结合起来运用,有其能够适用于城市机动车辆的档案办理作业、特别的交通办理作业,能有用地进步交通流量,加强安全捍卫作业,如协助交管部分主动捕捉违章轿车车牌号码,主动捕获违章车辆;协助公安部分主动监测在逃车辆、寻觅罪犯轿车,处理通缉车辆、套牌车辆和被盗轿车的主动稽察问题,能够主动告警,告诉执勤人员拦查,克服了人工拦查作业量大、漏报率高、作业危险性大等问题。
泊车场办理:在泊车场出、入口处,设有车牌主动辨认体系,对进出泊车场的车辆主动辨认,并依据数据库中的车牌数据判别是否是已买(或租)车位的车辆,对已买(或租)的车辆放行,并主动记载其收支泊车场时刻,以便呈现车辆被盗等状况时查询,对进入泊车场的已买(或租)车位的车辆主动将其车位处的挡车器翻开,以便车辆停放;对其它车辆,将主动记载其收支泊车场的时刻,以便计时收费,对进入泊车场的其他车辆主动分配车位并将其车位处的挡车器翻开,以便车辆停放。
2、车牌辨认技能在部队的运用
车牌主动辨认技能作为车辆辨认的先迸技能手段,在部队能够用于以下几个方面:
军事禁区车辆出、入辨认:对某部军车进行挂号,其车牌及外贸、色彩等信息记载在核算机数据库中,在该军事禁区大门处,设置车牌主动辨认体系,对进出车辆主动辨认,并依据数据中的车牌数据和表面、色彩等特征参数,判别是否时该部军车,对该部军车主动放行,使其能够不泊车甚至不减速通过,这种快速通行才能会为军事行动赢得名贵的时刻;一同,主动施行记载军车收支大门的时刻,以便及时准确地把握出车状况,完结对车辆的准确办理,如有车辆未准时归队,该体系能主动报警;对该部对外车辆,主动辨认并禁止通行,按有关规则要求挂号、批阅后,方可答应其进入。
动车场(库)车辆出、入办理:在车场(库)收支口设置车牌主动辨认体系,对进出车辆主动进行辨认并实时记载车辆收支大门的时刻,以便及时准确地把握出车状况,完结对车辆的准确办理,如有车辆未准时回来,该体系能主动报警。
哨卡(关卡)车辆通行办理:在哨卡(关卡)设置车牌主动辨认体系,允许通行车辆的车牌信息输入核算机数据库中,可被主动辨认并放行,往复一次后,数据库中的车牌信息随即删去;其他车辆主动辨认后一概禁止通行并主动报警,告诉警卫人员拦查、等级后移交捍卫部分处理。
三、车牌辨认的技能难点
车牌辨认体系发展迅速,各国公司都相继推出是何本国车牌特征的LPR体系,LPR研讨因为遭到多方面的约束,其技能还存在着一些缺少。现在车牌辨认技能存在的最大的问题是不确认性引起的辨认率的问题,特别是针对不同条件LPR体系的满意适应性条件下的辨认率问题。
从选用车牌辨认技能的高速公路办理部分反应的信息来看,现在这种技能能够到达的最大精度只需95%,还有5%的车辆体系辨认不出车牌。影响辨认率的原因较多,大致归结于车牌自身的特征和外界特征两大方面:
(1) 车牌的外形规划、制作等多方面要素使得车牌辨认体系的杂乱性进步, 不确认性增大。这些状况包括:
(a) 车牌缺少一致的规范。依据中华人民和国公共安全行业规范对机动车辆牌的有关规则,车牌的规范、色彩和适用规模各不相同。例如:小轿车牌用的是蓝底白字;大型轿车所用的黄底黑字;军用或警用的是白底黑字、红字。缺少一致的规范,使得车牌辨认进程中字符切割难度较大,缺少一致的方式规矩的指 导效果。
(b) 车牌的质量无法确保。有些车牌比较脏或已污损,有些车牌的字符含糊不清,对光线的散射性欠好。这些不确认性都极大的影响车牌辨认的准确率。
(c) 车牌邻近环境恶劣,有较杂乱的外形或挡车器等,不利于车牌定位切割。
(2) 外界环境特征也是添加车牌辨认体系不确认性,影响辨认率的重要要素之一。这些状况包括:
(a) 外界光照条件各不相同,白天和晚上光照不同。光照对图象质量的影响较大。不同光照的视点,对车牌反光的不均匀度影响也较大。不一同刻,不同的这以后条件,以及布景光、车牌反光程度终究决议了车牌区域的亮度特征。从试验进程能够看出这些外界条件对车牌的粗定位和准确认位影响较大。
(b) 外界布景的杂乱度也影响着车牌的定位率。布景中也车牌区域特征相似区域的巨细反映了布景的噪声程度。如与车牌字符相似的布景远处的广告牌易影响车牌的粗定位 。
四、车牌定位的FPGA硬件完结顶层电路结构
本规划运用Atlys Spartan?-6 FPGA 开发套件硬件渠道,运用其上的Xilinx Spartan?-6 XC6LX16-CS324的大容量逻辑资源完结车牌定位的FPAG全硬件规划。车牌定位电路运用的FPGA型号为XC6LX16-CS324,此FPGA具有 2278个slice,32个DSP48A1,Block RAM blocks最大是576kb,2个CMT(4个DCM,2个PLL)。
关于本规划的车牌定位电路是一个图画处理的电路,因而对存储器资源要求的比较大。在Atlys Spartan?-6 FPGA 开发套件硬件渠道上有48Mbytes 的外部存储器资源可用。
体系全体框图如下:
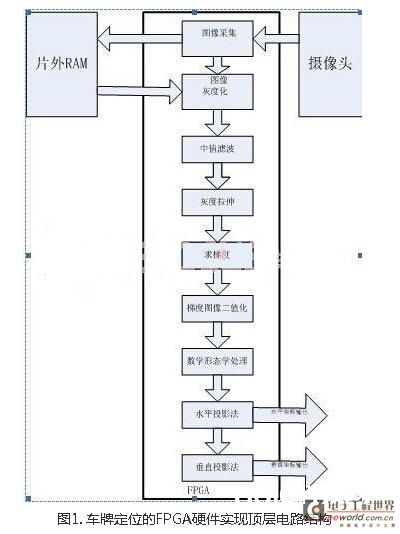
五、车牌定位的FPGA完结的各个子模块
5.1车牌图画的预处理
图画预处理的效果是杰出图画中的有用信息,不同的图画预处理对应于不同的图画切割以取得最佳的车牌特征。车牌定位预处理方针是杰出车牌区域的特征,按捺其它无用的特征。图画的预处理包括图画灰度化、滑润滤波、锐化等内容。
5.1.1 图画的灰度化
灰度图的特征是:只需亮度信息,没有色彩信息。五颜六色位图结构杂乱,难以处理,灰度图较简略,易于处理。灰度图的亮度信息,现已足以判别对车牌进行定位了,所以挑选较简单处理的灰度图。灰度图是只含亮度信息不含色彩信息的图画,其间亮度值量化为256级。灰度图进行算法处理比较便利,并且更为重要的是能够在FPGA处理时大大的节约存储空间。
首要RGB值相同,且图画数据便是调色板索引值,也便是实践的RGB的亮度值,又因调色板是256色的,所以图画数据中一个字节代表一个。假如是五颜六色的256色图,则通过图画处理算法后,或许会发生不属于这256种色彩的新色彩,而真五颜六色RGB图画有必要用三个与图画尺度相同的矩阵来存储,这样核算价值过大。所以,一般选用256级灰度图来进行处理。因为收集的图画是五颜六色图画,所以要把五颜六色图画转化为灰度图画。灰度改换有时又被称为图画的对比度增强或对比度拉伸。假定输入图画中的一个像素的灰度级为Z,通过T(Z)函数改换后输出图画对应的灰度级为Z,其间要求Z和Z都要在图画的灰度规模之内。依据T()方式,能够将灰度改换分为线性改换和非线性改换。详细运用中选用何种T(),需求依据改换的要求而定。灰度改换的详细办法是:首要将原始图画从RGB空间转化为YCbCr空间,Y重量包括亮度信息,Cb和Cr重量包括色度和饱和度信息,然后仅提取Y重量生成灰度图。五颜六色图画由RGB空间改换为YCbCr空间的转化联系为: 五颜六色图画由YCbCr空间改换为RGB空间的转化联系为:
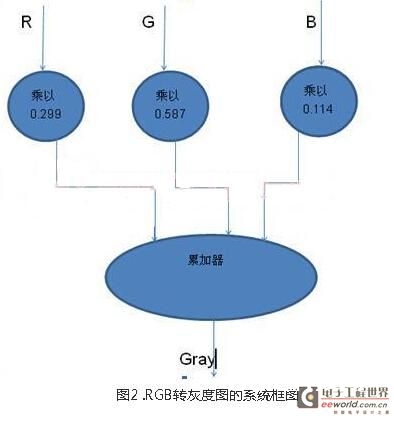
所以,终究咱们得到RGB色彩和灰度值的转化联系:
Gray=0.229R+0.587G+0.114B
在本规划中,咱们将0.299用10位定点小数表明:
0.299=10’h132,
0.587=10’h259,
0.114=10’h074;
RGB转灰度图的体系框图如下:
5.1.2 图画滑润
图画滑润首要是为了消除噪声。噪声并不限于人眼所能看的见的失真和变形,有些噪声只需在进行图画处理时才能够发现。图画的常见噪声首要有加性噪声、乘性噪声和量化噪声等。图画中的噪声往往和信号交错在一同,尤其是乘性噪声,假如滑润不妥,就会使图画自身的细节如鸿沟概括、线条等变的含糊不清,怎么既滑润掉噪声有尽量坚持图画细节,是图画滑润首要研讨的使命。一般来说,图画的能量首要会集在其低频部分,噪声地点的频段首要在高频段,一同体系中所要提取的轿车边际信息也首要会集在其高频部分,因而,怎么去掉高频搅扰又一同坚持边际信息,是咱们研讨的内容。为了去除噪声,有必要对图画进行滑润,能够选用低通滤波的办法去除高频搅扰。图画滑润包括空域法和频域法两大类,在空域法中,图画滑润的常用办法是选用均值滤波或中值滤波,关于均值滤波,它是用一个有奇数点的滑动窗口在图画上滑动,将窗口中心点对应的图画像素点的灰度值用窗口内的各个点的灰度值的平均值替代,假如滑动窗口规则了在取均值进程中窗口各个像素点所占的权重,也便是各个像素点的系数,这时候就称为加权均值滤波;关于中值滤波,它对一个滑动窗口内的诸像素灰度值排序,用其间间值替代窗口中心的像素的本来灰度值,它是一种非线性的图画滑润法,它对脉冲搅扰级椒盐噪声的按捺效果好,在按捺随机噪声的一同能有用维护图画尖利的边际,少受含糊。本规划选用的是中值滤波的办法。
中值滤波器的FPGA规划。中值滤波器首要由3部分组成:滤波窗口生成模块,队伍计数器模块,滤波算法模块。
5.1.2.1 滤波窗口生成模块的FPGA规划
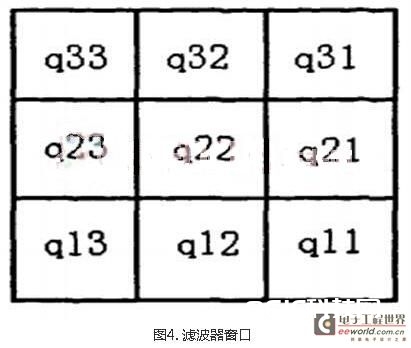
图画预处理算法往往针对邻域像素操作。以3×3的窗口为例,运用2个FIFO和6个寄存器对图画的行、列数据进行存储,规划滤波窗口如图1所示。
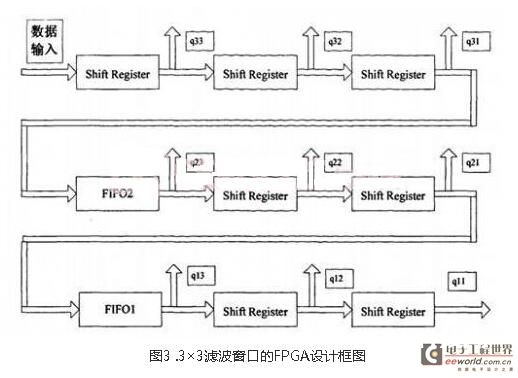
本方案将这些存储器进行级联,依照流水线操作,在对第n行数据存入内部存储器的一同,因为存储器之间的级联,可将先进入存储器的第n-1行,第n-2行……第1行依次存储到下一级存储器,这样在一个时钟周期内,尽管处理器只从外部存储器中读取一个数据,却能够完结数据并行输出,然后构成图画窗口。
本规划方案中运用的FIFO(Fillst In Fillst out)称为先进先出存储器, FlFO在xilinx供给的ISE能够通过IP核生成器定制,FIFO首要运用参数有需求存储的数据深度和数据宽度。数据深度表明 FIFO能够存储的数据量的巨细,数据宽度表明每一个数据的位数。因而在此图画处理体系中FIFO的数据深度有必要为一帧图画中一行的像素数,使得FIFO内正好贮存一行的数据;数据宽度为像素亮度位数——8位。
FIFO1中的数据为图画的第n行像素的亮度值,FlFO1的输入是FIFO2的输出, FIFO2中的数据为视频图画的第n+1行像素的亮度值,第n+2行视频像素亮度值通过3个移位寄存器后输入到FIFO2,q31、q32、q33与FlFO2的三个输出值q21、q22、q23 以及FlF01的三个输出值q11、q12、q13别离对应了3×3窗口的第n+2行,第n+1行和 第n行的输入。为了构成正确的滤波窗口,即要确保q11、q21、q31;q12、q22、q32; q13、q23、q33处在同列不同行的方位。由下图能够看到,此刻所构成的数据q11,q12,q13,q21,q22,q23,q31,q32,q33便是滤波所要求的3×3窗口。中心象素点 是q22。
5.1.2.2 队伍计数器规划
当窗口中心移动到图画的边际时,此刻,窗口是无效的。可是一般图画的边际不包括重要的信息,所以当窗口移动到边际时,能够直接将输出置为0。
5.1.2.3 滤波算法规划
关于3×3窗口的中值滤波,选用图3所示的5级比较电路输出中值,其输入数据为图2所示的滤波掩膜地点的图画数据。榜首级比较电路由3个三输入比较器C组成,每个比较器每个比较器的输出数据依序摆放(拜见图示)。将3组比较成果中最小的3个数放在一同、中心的3个数放在一同、最大的3个数放在一同,参加第二级比较。第二级比较电路的原理与榜首级相似,输出out1和out9,别离是输入数据中的最大值和最小值, 这2个数据将被舍去不参加下一级比较。参加第三级比较的有 7个数据,其原理相似于前两级比较电路,输出out2和out8别离是该7个数据的最大值和最小值,并且被舍去,仅留下5个数据参加第四级比较。剩余的几级比较电路以相似于从前的原理进行比较。如此,通过5级比较后即可得到9个数据的规范中值滤波输出值mid9。此外,为了确保流水线操作进程中数据的同步性,在第三级和第四级比较电路中需求刺进数据寄存器R缓存当时该级中不参加比较的数据。
5.2灰度拉伸改进图画质量
为了增强车辆图画和车牌图画(提取自车辆图画)的对比度,使其明暗显着,有利于车牌辨认,需求对它们进行灰度拉伸,来改进图画质量。
灰度拉伸是将灰度进行分段线性改换,它将输入图画中某点(x,y)的灰度f(x,y),通过映射函数T,映射成输出图画中的灰度g(x,y),即:g(x,y)=T[f(x,y)]灰度拉伸改换原理图如下图所示,函数表达式为:
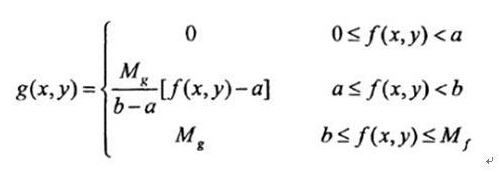
其间,关于256级图画来说,Mg = 255。一同当a = 25, b = 35时灰度拉伸可取得较好效果。
5.3 图画的边际测验——求梯度
对车牌区域检测需求运用车牌区域所特有的特点。依照方式辨认原理,应找到车牌区域图画的固有的且与图画其它区域不易混杂的特点,并且所运用的特点在各种环境下吸取的图画具有安稳性。通过剖析可知,在各种条件下车牌地点的图画区域安稳牢靠的信息是它具有丰厚的边际,因而本文规划了以对边际信息剖析为根底的算法。车牌布景色和字符色之间的对比度比较显着,并且在车牌中几个字符接连呈现,在水平方向上构成一系列明暗替换的方式,运用这一特征就能够在图画中对车牌地点的区域进行定位。为了提取这种特征,本文规划并改进了一个水平方向的一维梯度算子:
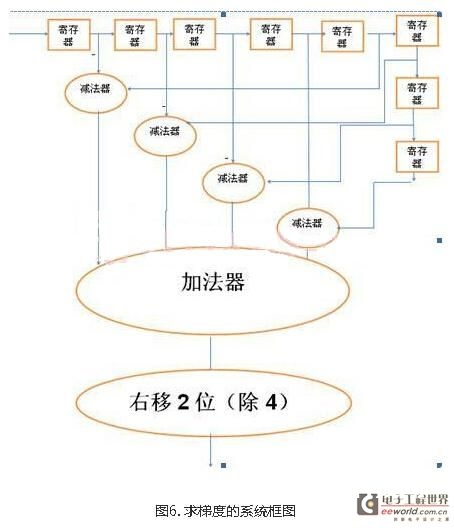
其间式中R,d的选取与图画中车牌的巨细有关。R,d的选取能够依据输入图画的实践状况进行调整,只需确保R/2+d大于车牌中字符笔画的宽度既可起到加强车牌区域边际特征的效果。在本规划中R暂时取经历值4,d取经历值 2。这种办法是将图画中每一行中R个接连的水平方向梯度值相加,而梯度值则是由水平方向相隔2d-1个点的象素点的灰度的差值。
求梯度的体系框图如下:
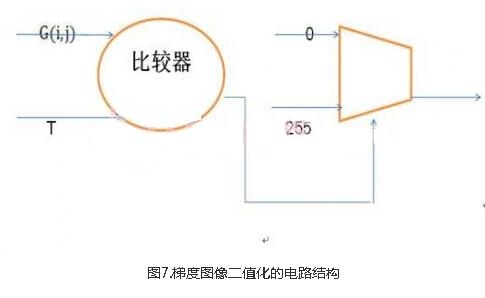
5.4 梯度图画的二值化
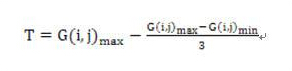
为了便利后续的作业,需求对灰度图画进行二值化。依据下式对通过第4步求出的梯度图画进行二值化。依据下式取得阈值。
其间,G(i,j)为梯度处理后的灰度图画的像素值。 依据得到的阈值对灰度图画进行图画的二值化。其二值化的电路框图如下:
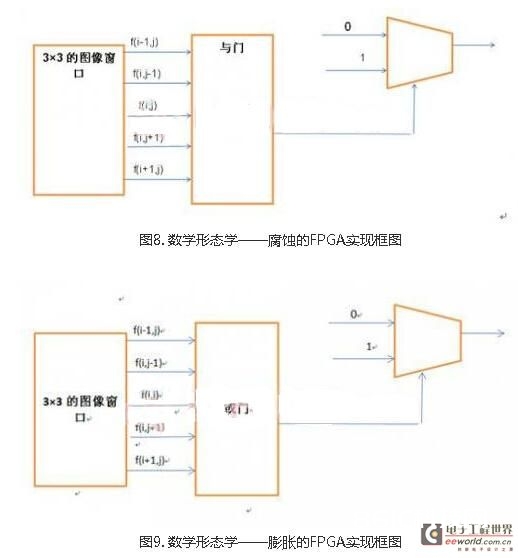
5.5 数学形态学处理
数学形态学(Mathematical Morphology)是剖析几许形状和结构的数学办法,是建立在调集代数根底上,用调集论办法定量描绘几许结构的科学吲。数学形态学是由一组形态学的代数算子组成的。最基本的形态学算子有:腐蚀、胀大、开和闭。关于后两个,开是先腐蚀后胀大,闭是先胀大后腐蚀。
腐蚀的效果是消除物体鸿沟点,使方针缩小,能够消除小于结构元素的噪声点;胀大的效果是将与物体触摸的一切布景点合并到物体中,使方针增大,可加添方针中的空泛。
开运算是先腐蚀后胀大的进程,能够消除图画上细微的噪声,并滑润物体鸿沟。
闭运算时先胀大后腐蚀的进程,能够填充物体内细微的空泛,并滑润物体鸿沟。
本规划中,关于从前得到的二值化图画,先用一次胀大,使车牌区域合并到一同,然后再对其进行一次闭运算,即先胀大后腐蚀。去掉一些细微的搅扰和粘连。
因为本规划中,需求加强的水平缓笔直方向的边际,所以挑选如下表所示的结构元素。

数学形态学的FPGA规划,在本规划中,所用的3×3的结构元素,需求一个3×3的窗口,此窗口的规划和中值滤波器中所规划的窗口完全相同。
结构元素的运算单元的规划:
腐蚀的详细操作是:用一个结构元素(一般是3×3的巨细)扫描图画中的每一个像素,用结构元素中的每一个非0像素与其掩盖的像素做“与”操作,假如都为1,则该像素为1,否则为0。
胀大的详细操作是:用一个结构元素(一般是3×3的巨细)扫描图画中的每一个像素,用结构元素中的每一个非0像素与其掩盖的像素做“与”操作,假如都为0,则该像素为0,否则为1。
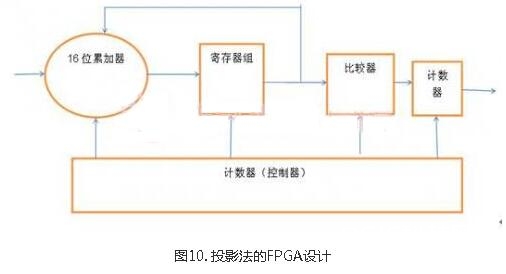
5.6 用“投影法”来完结车牌定位
对数学形态学处理后的二值化的车牌图画沿水平方向进行投影,以确认车牌地点区域。投影值为每一行的白色像素点的累加值。对投影值进行剖析,假如投影值大过阈值R时,以为或许是车牌地点区域。假如从该行起接连10行的投影值都大于阐值R,则以为是车牌的或许地点区域,并将其标出。
定位出的车牌或许区域有几个,需求对其进行再次的定位,以确认出车牌地点区域条。本规划中从下往上,对每一个车牌或许区域进行笔直方向的投影,投影值为白色像素点的累加值。然后从左往右查找累加值不为零的投影点。找到后从该点开端,找榜首个为零的投影点。依据这两点得到两点间的间隔,假如此间隔大于预设的经历阈值P,则确定此区域为车牌地点区域,然后将车牌的区域的4个极点坐标输出。
投影法的FPGA规划框图如下: