






#ifndef _KALMAN_H_
#define _KALMAN_H_
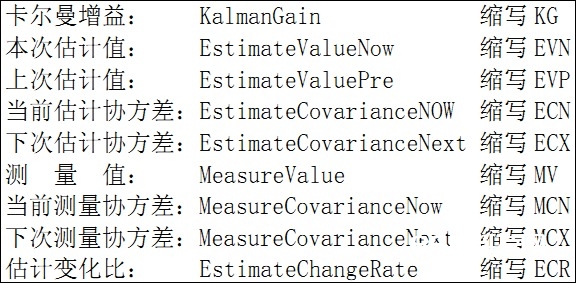
extern KalmanGain;// 卡尔曼增益
extern EstimateCovariance;//估量协方差
extern MeasureCovariance;//丈量协方差
extern EstimateValue;//估量值
extern void KalmanFilterInit(void);
extern KalmanFilter( Measure);
#endif
#include “config.h”
#include “math.h”
KalmanGain;// 卡尔曼增益
EstimateCovariance;//估量协方差
MeasureCovariance;//丈量协方差
EstimateValue;//估量值
void KalmanFilterInit(void);
extern float KalmanFilter(float Measure);
void KalmanFilterInit(void)
{
EstimateValue=0;
EstimateCovariance=0.1;
MeasureCovariance=0.02;
}
KalmanFilter( Measure)
{
//核算卡尔曼增益
KalmanGain=EstimateCovariance*sqrt(1/(EstimateCovariance*EstimateCovariance+MeasureCovariance*MeasureCovariance));
//核算本次滤波估量值
EstimateValue=EstimateValue+KalmanGain*(Measure-EstimateValue);
//更新估量协方差
EstimateCovariance=sqrt(1-KalmanGain)*EstimateCovariance;
//更新丈量方差
MeasureCovariance=sqrt(1-KalmanGain)*MeasureCovariance;
//回来估量值
return EstimateValue;
}






