


Created
学习笔记
for
redesigned
2012-09-14
versions:12_09_01
(1)传感器信号的收集、处理
(2)加热丝的PWM输出
(3)加热的温度和速度操控
(4)温控体系运转流程操控:程序初始化、温控的发动与完毕、液晶显现模块操控
(5)温控信息显现与参数设定:状况显现、操控算法参数设定等
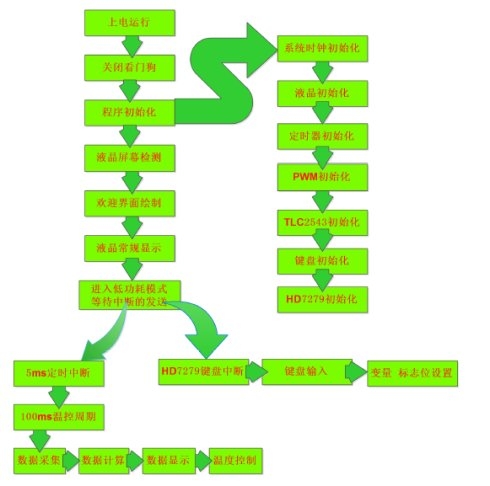
上面的几个能中,除了程序的初始化在主函数中履行,其他的各个部分都是在中止函数中履行的,其间键盘检测和数据输入是在键盘中止中履行,其他的数据收集、处理、操控等都是在定时器5ms中止中履行的。单片机平常处于低功耗形式,下降功耗。
程序的流程图如下:
本文首要选用两种算法完成标题要求:
第一个是PID算法的改善,由于温度操控是一个只能加热不能制冷的操控,所以咱们只用了PI。首要经过P让温度加到一个离设定温度较近的温度,然后使用I迫临设定温度。
程序如下:
void
{
e1=set_t-now_t;
uk=kp*e1+ki*e2+kd*e3;
//
e2=e1+e2;
e3=e1-e4;
e4=e1;
if(uk>speed)
uk=speed;
if(uk<0)
uk=0;
control_value=1-uk;
}
第二个是时刻操控的线性算法
在时刻操控中要求温度从40°均匀加热到60°,而且时刻恣意可设。
本程序完成的办法是:设定时刻set_time是以s为单位,把40°到60°的这20°温差均匀分红set_time份。然后在操控周期中,每一个周期让时刻段time_m自加1,然后依据均匀的公式算出该时刻段应该到达的温度,公式如下:

由于操控时刻输入set_time是以s为单位,而操控周期是100ms,所以上面要除以10。
详细的完成代码如下:
control_m_value=(float)time_m/set_time;
control_m_value=control_m_value/10;
control_m_value=40+20*control_m_value;
set_t=control_m_value;
pid();
CCR1=control_value*12000;






