


本文介绍的速度与路程表规划以单片机和光电传感器为中心。传感器将不同车速转变成的不同频率的脉冲信号输入到单片机进行操控与核算,再选用LED模块进行显现,使得电动自行车的速度与路程数据能直观的显现给使用者。
体系概述
本体系由信号预处理电路、单片机AT89C2051、体系化LED显现模块、串口数据存储电路和体系软件组成。其间信号预处理电路包括信号扩大、波形改换和波形整形。对待测信号进行扩大的意图是下降对待测信号的起伏要求;波形改换和波形 , 整形电路则用来将扩大的信号转化成可与单片机相连的TTL信号;经过单片机的设置可使内部定时器T1对脉冲输入引脚T0进行操控,这样能精确地算出加到T0引脚的单位时刻内检测到的脉冲数;规划中速度显现选用LED模块,经过速度换算得来的路程数选用I2C总线并经过E2PROM来存储,既节省了所需单片机的口线和外围器材,一起也简化了显现部分的软件编程。体系的原理框图如图1所示。

图1 体系的原理框图
作业原理
该规划能实时地将所测的速度与累计路程数显现出来,主要是将传感器输入到单片机的脉冲信号的频率(传感器将不同车速转变成不同频率的脉冲信号)实时地丈量出来,考虑到信号的衰减、搅扰等影响,在信号送入单片机前应对其进行扩大整形,然后经过单片机核算出速度和路程,再将所得的数据存储到串口数据存储器,并由LED显现模块替换显现所测速度与路程。本规划的路程数的算法是一种大约的算法(假设在必定时刻内自行车是匀速跋涉,平均速度与时刻的乘积即为路程数)。
规划时,应归纳考虑测速精度和体系反应时刻。本规划用丈量脉冲频率来核算速度,因而具有较高的测速精度。在核算路程时取了自行车的抱负状况。实践中,差错操控在几米之内,相对于整个路程来说不是很大。为了确保体系的实时性,体系的速度转化模块和显现数据转BCD码模块都选用快速算法。别的,还应尽量确保其他子模块在编程时的通用性和高效性。本规划的速度和路程值选用6位显现,并包括两个小数位。
体系的硬件规划
1 脉冲产生源
脉冲产生源本规划选用了ST1101红外光电传感器,进行非触摸式检测。当有物体挡在红外光电发光二极管和高灵敏度的光电晶体管之间时,传感器将会输出一个低电平,而当没有物体挡在中心时则输出为高电平,然后构成一个脉冲。该体系在自行车后轮的轴处保持着与轮子旋转切面平行的方向延伸附加一个铝盘,在这个铝盘的边缘处挖出若干个圆形过孔,把传感器的检测部分放在圆孔的圆心方位。每逢铝盘跟着后轮旋转的时分,传感器将向外输出若干个脉冲。把这些脉冲经过一系列的波形整构成单片机能够辨认的TTL电平,即可算出轮子即时的转速。铝盘的圆孔的个数决议了丈量的精度,个数越多,精度越高。这样就能够在单位时刻内尽可能多地得到脉冲数,然后避免了因为两个过孔之间的间隔过大,而车子正好在过孔之间或者是在下个过孔之前中止了,形成较大的差错。
本规划在铝盘过孔的规划上选用11个过孔,然后留下了10个平等的距离。这样在今后的软件规划中能够较为便利的核算出速度路程。脉冲产生源的硬件结构图如图2所示。
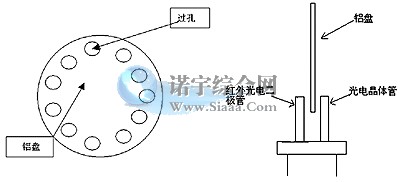
图2 脉冲产生源硬件结构图(左为正视图,右为侧视图)
2 信号预处理电路
信号预处理电路如图3所示,体系的信号预处理电路由二级电路构成,榜首级是由开关三极管组成的零偏置扩大器,选用开关三极管能够确保扩大器具有杰出的高频呼应。当输入信号为零或负电压时,三极管截止,电路输出高电平;而当输入信号为正电压时,三极管导通,此刻输出电压跟着输入电压的上升而下降,这使得速度路程表既能够丈量恣意方波信号的频率,也能够丈量正弦波信号的频率。因为扩大器的扩大功用下降了对待测信号的起伏要求,因而,体系能对恣意大于0.5V的正弦波和脉冲信号进行丈量。预处理电路的第二级选用带施密特触发器的反相器DM74LS14来把扩大器生成的单相脉冲转化成与COMS电平相兼容的方波信号(如图4所示),一起将输出信号加到单片机的P3.4口上。






