


摘要:皮带运送机在作业进程中,因为负载、皮带本身所受张力的不同,常常会产生打滑、跑偏、过载、撕裂等毛病。本文旨在研讨这些毛病产生的原因,并经过智能控制器显现产生的毛病,做到毛病定位精确。本体系经过一些传感器对毛病进行检测,将信号传入单片机,不同毛病编码显现,经过数码管显现能够快速知道毛病方位。体系以单片机为中心,经过外部信号和软件规划,大大提高体系稳定性。
关键词:皮带运送机;毛病检测;毛病显现;单片机
皮带运送机是一种冲突驱动以接连办法运送物料的机械,能够将物料在必定的运送线上,从开始的供料点到终究的卸料点间构成一种物料的运送流程。皮带运送机现在被广
泛的用在码头、煤矿和工业配料等方面,皮带运送机的安全高效作业直接影响着出产的功率。关于多条皮带运送机组成的长距离运送体系,其间一条产生毛病如不能及时预告扫除,将会对整个出产线形成影响。
1 皮带运送机毛病剖析
因为海绵垫在出产中需求进行烘干的处理,而刚出产出来的海绵垫因为本身水分过大,不能接受过大的张力,否则会拉断,所以在工业出产中挑选皮带作为传动进程的载体。皮带在作业进程中容易产生打滑、过负荷和断带等毛病,这些毛病都能够经过对皮带速度的检测进行判别。
皮带打滑首要是因为皮带与传动辊之间冲突削减,一方面或许是皮带没有张紧,另一方面或许皮带老化形成抓地作用差,直接的体现便是皮带速度低于设定的速度。
过负荷毛病产生的原因首要是皮带张的太紧或许运送的物品超过了额外承载量。该毛病或许导致皮带传动驱动器报警而中止作业,直接的体现便是速度小于设定值。其监控的办法能够经过监控驱动器的电流判别。
断带产生的原因或许是皮带老化,或许联轴器机械毛病断开。当毛病产生时,皮带速度会急剧下降,瞬间可中止作业。
2 皮带毛病怎么检测
2.1 皮带打滑
皮带打滑时直接影响便是主传动速度与设定速度不一致,假定主滚动速度为Vp,设定速度为Vs,打滑时速度差错在必定范围内咱们疏忽影响,假定极限为10%就需求进行检
修,那么毛病判别为
,在此进程中,在皮带上设置一根被迫辊,用挨近开关勘探被迫辊单位时间里旋转的圈数,乘上被迫辊的周长就能够算出皮带的作业速度了。挨近开关的装置如图1所示。
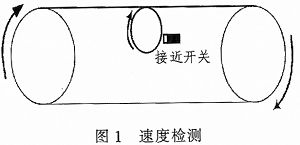
假定T秒内测得的挨近开关脉冲数为n,被迫辊的周长为C,那么
,Vs能够依据设定给驱动器的电压得到,假定电压为E,电压与速度系数为K,那么Vs=K*E,这样就能够经过这些参数判别皮带是否打滑了。
2.2 皮带跑偏
跑偏的检测选用对射光电管,装置办法如图2所示。
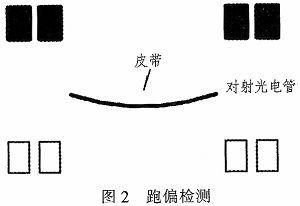
经过检测对射光电管的开断能够判别皮带是否跑偏,并触发报警体系进行声光报警,避免呈现严峻机器毛病。内侧为一级跑偏检测,外侧为二级跑偏检测。
2.3 过负荷检测
在工业出产中,为了更好的满意出产需求,一般选用变频器驱动电机进行调速,当负载添加时,变频器的电流也会添加。咱们经过设置变频器的电流来维护电机,使其作业在安全状态下。当电机电流超出设定的电流门限时,输出报警,并驱动外部声光报警器。
2.4 皮带开裂和联轴器脱辊检测
当皮带或许联轴器脱辊时,榜首影响的便是皮带的速度,检测皮带的速度敏捷下降,几秒内或许就变为0。在这些毛病的检测中,最多重视的便是皮带速度的检测,经过一些毛病对速度的影响,运用反推的办法,根本能够完成毛病的全监控。
3 智能控制器硬件电路规划
本体系以单片机STC90C516为中心,外围首要由挨近开关、对射光电管、变频器、LED显现器、D/A转化模块PCF8951T和一些辅佐电路组成。下图3给出了硬件的原理图。
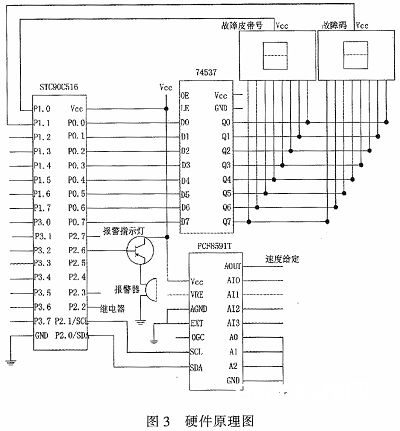
经过将外部的电机发动信号输入P1.2口,中止信号接P1.3口,P2.2口接发动继电器,完成当检测到P1.2按键被按下时,继电器吸合,电机发动;当检测到P1.3口按键被按下时,继电器断开,电机中止作业。体系选用2个8段码LED显现,一个显现毛病皮带的皮带号码,另一个显现毛病代码。
预设毛病代码为:0—正常;1—打滑;2—开裂或联轴器未衔接;3—皮带跑偏。如果有毛病产生,P2.6将驱动蜂鸣器进行报警,一起P2.7将使指示灯闪耀到达声光报警的作用。体系选用PCF8951T的A/D转化芯片,直接经过SCL、SDC的I2C总线,将AOUT的输出模拟量作为传动辊的速度信号,并经过P1.5和P1.6完成加减速。
将被迫辊的速度探头检测信号接入P1.4,经过对单位时间内测得的脉冲数,得到皮带作业的速度,与给定的速度信号进行比照,能够剖析皮带是否正常作业。一根皮带选用4对对射光电管,分两组对皮带是否跑偏进行检测,一级跑偏时进行预警,二级跑偏时将中止皮带的运送,以避免不必要的财产损失。
4 软件规划
本体系选用C言语进行编程,由主程序和各个子程序组成。智能控制器的程序流程图如图4所示。
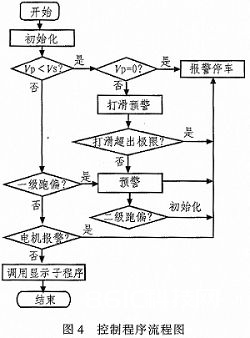
程序初始化后,顺次查看皮带是否打滑、跑偏、电机是否过载报警等毛病,并依据毛病的等级进行相应的处理。LED显现毛病代码选用调用子程序的办法。编程软件选用Keil进行规划,并对相应的程序进行模块化处理。
5 结束语
首要针对如今国内干流的海绵出产线容易产生的毛病进行剖析研讨,规划了集报警、显现、操作于一体的自动化体系。该体系首要以单片机为中心,充分利用了单片机集成度高、功用强、体积小、功耗低和可靠性高级特色。在实验中,差错较小,根本能够满意运用的要求。






