


摘要:依据dsPIC30F6010微处理器规划了无刷直流电动机有方位传感器法和反电势过零检测法的调速体系。依据无刷直流电动机的特色和所用操控芯片的功用,别离提出了有方位传感器法和无方位传感器法的操控计划。从实验测验成果来看,电机发动安稳快速、正常,作业杰出,具有较宽的调速规模等,反电动势过零检测法补偿图形符合要求。
导言
无刷直流电动机作为机电一体化产品,既具有沟通电动机的结构简略、运转牢靠、保护便利等一系列长处,又具有有刷直流电机的运转效率高、元励磁损耗以及调速功能好等许多长处。一起,它克服了有刷直流电机因为机械电刷和换向器的存在所带来的噪声、火花、无线电搅扰以及寿命短等弊端,而且制作成本低,简化了电机的修理,因此在工业上(特别是微特电机范畴),以及在小功率、高转速的调速范畴的使用越来越广泛。
依据dsPIC30F6010微处理器的无刷直流电机操控体系,剖析了永磁无刷直流电动机的作业原理,并树立数学模型,然后依据原理和模型拟定出无刷直流电动机的调速体系计划,并仿真得到理论上的PI参数。依据调速体系计划,在MPLAB体系开发平台上运用汇编语言别离用电机自带的方位传感器和反电动势过零检测法两种办法进行编程、调试,完结无刷直流电动机的数字操控。
1 无刷直流电动机数学模型
![]()
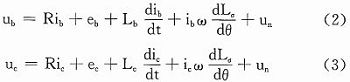
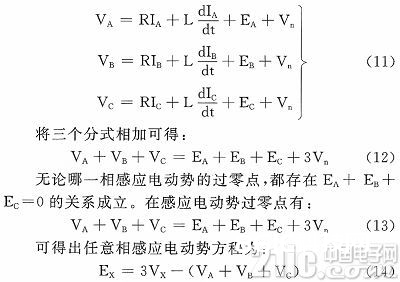
式中:ua,ub,uc表明电机三相相电压;ea,eb,ec表明电机各相反电势;ia,ib,ic表明电机三相相电流;La,Lb,Lc表明电机三相绕组的自感;R、Lσ为每相绕组电阻和电感;ω为转子电角速度;θ为转子电视点;un为定子绕组中性点电压;t为时刻量。
因为每相绕组漏电感等效为常数,即dLσ/dt=0,所以可将式(1)~(3)整理成下式:
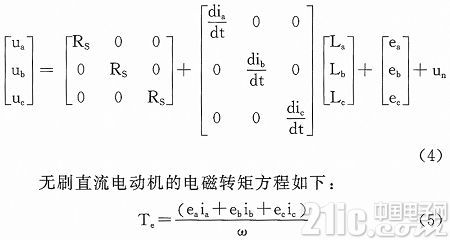
式中:Te为电机的电磁转矩;ω为电机转子的机械角速度,能够看出其转矩方程与一般直流电机方程类似,转矩跟着电流幅值的增大而增大。
给恣意两相无刷直流电动机通电,假定无转矩脉动,相电流与之对应的感应电动势平顶部分彻底重合,则发现恣意两相相电流巨细持平,方向相反,不通电相相电流为零,通过式(5)得出电磁功率和电磁转矩,别离表明如下:
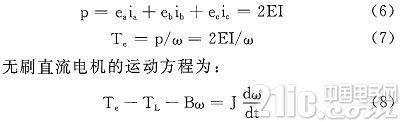
式中:TL为负载转矩;B为阻尼系数;J为滚动惯量。
2 体系操控计划
因为受IGBT等器材的功率约束,PWM调速只能使用在中、小功率情况下,电机为小功率电机,用PWM改动电枢端电压进行调速。
抱负元刷直流电动机的感应电动势和电磁转矩公式如下:
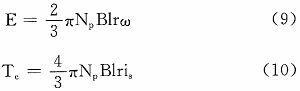
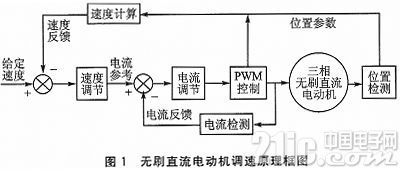
其间:Np为通电导体数;1为转子铁心长度;r为转子半径;is为定子电流。无刷直流电动机调速原理框图如图1所示。
2.1 有方位传感器法
给定转速与速度反响量构成误差,经速度PI调理后发生电流参考值,与电流反响值的误差经电流PI调理后构成PWM占空比的操控量,完结电动机的速度操控。
2.2 反电势过零检测法
三相无刷直流电动机每转过60°需求换相一次,而转过一周需求6个换相点。无刷直流电机在恣意6个换相阶段,只要两相通电而且通电电流方向相反,第三相不通电,相电流为零。假定其为断开相,则可列出方程:
3 操控体系硬件结构规划
dsP%&&&&&%30F6010为16位(数据)改善的哈佛结构,是一款专为电机操控使用规划的80引脚的DSC,运算灵敏,数据处理能力强(内部有两个40位的累加器),指令集灵敏而且支撑小数运算。
3.1 有方位传感器法硬件体系
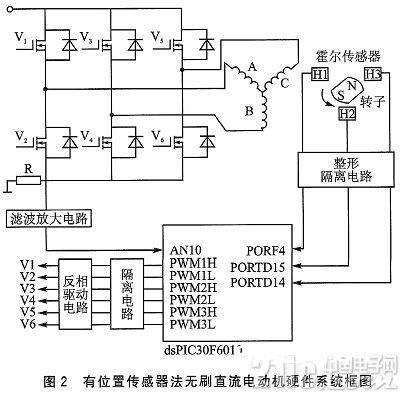
有方位传感器法无刷直流电动机硬件体系框图如图2所示。
3.2 反电势过零检测法硬件体系
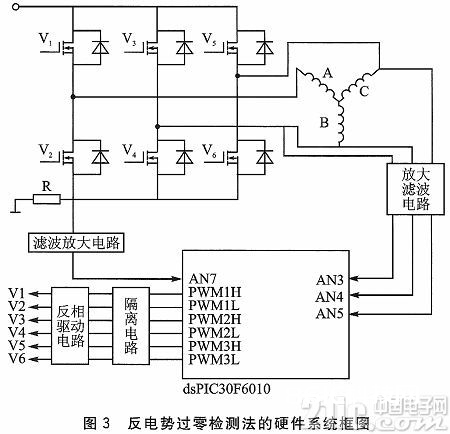
反电势过零检测法无刷直流电动机硬件体系框图如图3所示。
4 操控体系的软件规划
4.1 有方位传感器程序整体结构规划
软件规划首要选用MPLAB IDE 7.40作为开发环境。整个操控体系的软件部分由主程序、A/D中止服务子程序(其间包含速度调理子程序和电流调理子程序)、电平改变中止子程序以及毛病引脚子程序和中止圈套组成。
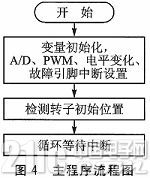
主程序首要完结操控器体系时钟模块的初始化(为核算两相换相时刻)、中止的设置、电机的初始方位检测,之后主程序进入循环等候,直到触发中止跳入中止子程序。主程序流程图如图4所示。
4.2 反电动势过零检测法程序整体结构规划
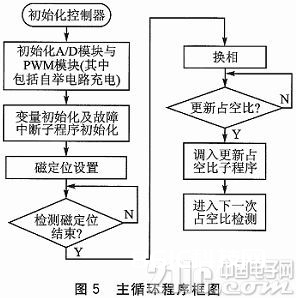
主循环程序框图如图5所示。
5 实验研讨
实验所用电机为方波驱动的三相无刷直流电动机。电机内置的霍尔方位传感器选用SS41霍尼韦尔开关量方位传感器。相关参数如下:额外转速3000 rpm、额外转矩0.22 N·m、转矩系数0.0522Nm/A、额外电源电压24 V、额外功率70 W、额外电流5.18 A、5对极、三相绕组电阻0.488 Ω、三相绕组自感1.19 mH、电势系数0.0482 Vs/rad、电气时刻常数2.44 ms、机械时刻常数0.338 ms。
5.1 无刷直流电动机的开环实验
别离丈量6组数据,并记录下转速和与之对应的占空比,表1为必定占空比情况下电机所对应的转速。从实验现象能够看出,电机在空载或轻载条件下,体系能够快速、安稳地到达设定转速,调速规模宽。其间,电机转速在有方位传感器条件下到达了100~2 850 r/min,整个体系能很好地完结电机的发动、滚动、中止、回转等功用。在反电动势过零检测法中,电机因为遭到感应电动势检测困难的影响,发动速度在730 r/min以下时,会形成电机滚动不接连或中止,但是在800 r/min以上时运转杰出,与有方位传感器在转速上相比较,要比有方位传感器更快。
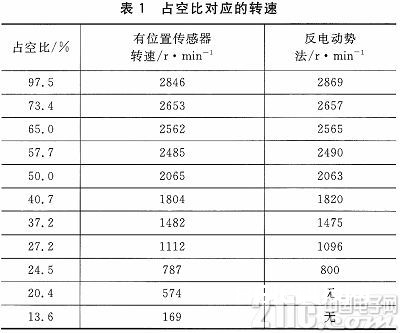
一方面可能是实验所用电机的霍尔信号装置工艺与感应电动势之间存在差异,另一方面可能是电机本身电磁搅扰、高频PWM信号对方位反响信号电路的搅扰等影响了方位反响的精度形成的。这愈加证明了无方位传感器使用在无刷直流电动机上的优越性。
5.2 无刷直流电动机两种办法的闭环实验
图6可视为二阶体系,从发动到电机安稳运转共通过3 000个速度采样点,每一次速度调理需6.4 ms。电机发动时刻为t=1 s,上升时刻tr=3.03 s,峰值时刻为tp=3.10 s,最大超调量Mp=8%,调整时刻为ts=8.22 s,延迟时刻为td=2.48 s,在调整时刻内呼应曲线的振动次数为3次。开端的预定位时刻为1 s,后忽然换相,使得图中0~4.5 s处振动频频且发动调整时刻长,归于正常现象。选用双份额调理时,电机发动正常、体系超调量小、转速精度较高。
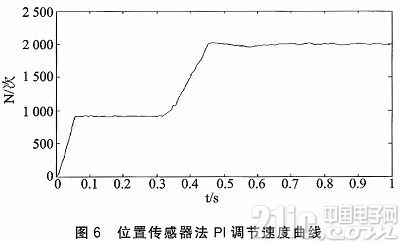
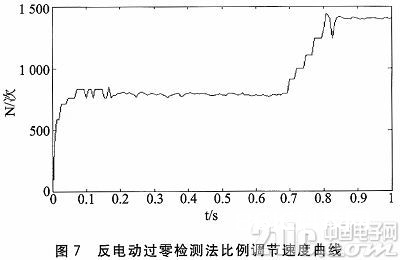
图7相同可视为二阶体系,每一次速度调理需求10 ms,通过3000采样点后可知电机横轴单位1代表30 s,其间电机定位时刻为1 s。电机发动时刻为t=3 s,上升时刻tr=2.11 s,峰值时刻为tp=2.50 s,最大超调量Mp=5%,调整时刻为ts=7.68 s,延迟时刻为td=1.03 s,在调整时刻内呼应曲线的震动次数为4次。从图中能够看出,选用PI调速体系时,电机发动平稳、体系超调量小、转速精度高。
结语
专用电机操控芯片硬件结构简略、操控能力强、软件完结便利、操控精度高、实时性强,能完结更为杂乱的算法,晋级空间较大,其高速的履行功能和丰厚的内置资源很好地满意了高功能无刷直流电动机调速操控体系的规划要求。开环环境下能够很迅速地到达速度要求,在闭环操控中发动、运转杰出,反响速度快。
本文使用dsPCI30F6010完结了电动机的全数字化操控,充分体现了体系操控和算法上的优越性。






