


在这里介绍一下用51单片机驱动步进电机的办法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需求 48 个脉冲完结!!!
该步进电机有6根引线,摆放次第如下:1:赤色、2:赤色、3:橙色、4:棕色、5:黄色、6:黑色。
选用51驱动ULN2003的办法进行驱动。
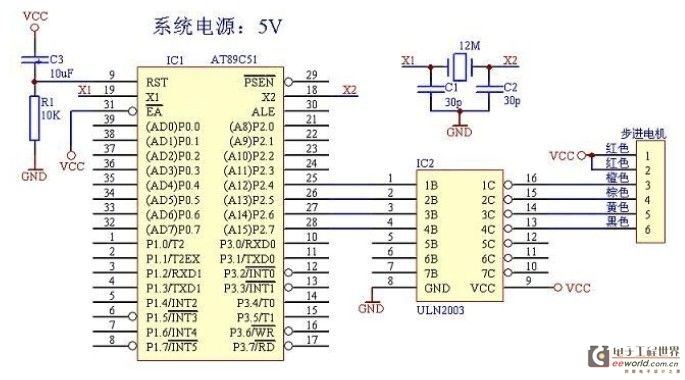
ULN2003的驱动直接用单片机体系的5V电压,或许力矩不是很大,我们可自行加大驱动电压到12V。
;******************************************************************************
;************************* 步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19
;———————————————————————————
; 步进电机的驱动信号有必要为 脉冲信号!!! 滚动的速度和脉冲的频率成正比!!!
; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需求 48 个脉冲完结!!!
;———————————————————————————
; A组线圈对应 P2.4
; B组线圈对应 P2.5
; C组线圈对应 P2.6
; D组线圈对应 P2.7
; 正转次第: AB组–BC组–CD组–DA组 (即一个脉冲,正转 7.5 度)
;———————————————————————————-
;—————————-正转————————– ORG 0000H LJMP MAIN ORG 0100H
MAIN:
MOV R3,#144 正转 3 圈共 144 脉冲 START: MOV R0,#00H START1: MOV P2,#00H MOV A,R0
MOV DPTR,#TABLE MOVC A,@A+DPTR
JZ START 对 A 的判别,当 A = 0 时则转到 START MOV P2,A
LCALL DELAY INC R0
DJNZ R3,START1
MOV P2,#00H LCALL DELAY1
;—————————–回转————————
MOV R3,#144 回转一圈共 144 个脉冲 START2:
MOV P2,#00H MOV R0,#05 START3: MOV A,R0
MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START2 MOV P2,A CALL DELAY INC R0
DJNZ R3,START3 MOV P2,#00H
LCALL DELAY1 LJMP MAIN
DELAY: MOV R7,#40步进电机的转速M3: MOV R6,#248 DJNZ R6,$ DJNZ R7,M3
RET
DELAY1: MOV R4,#20 2S 延时子程序 DEL2: MOV R3,#200 DEL3: MOV R2,#250 DJNZ R2,$ DJNZ R3,DEL3 DJNZ R4,DEL2 RET TABLE:
DB 30H,60H,0C0H,90H 正转表 DB 00 正转完毕
DB 30H,90H,0C0H,60H 回转表 DB 00 回转完毕 END
51单片机操控四相步进电机
拿 到步进电机,依据曾经看书对四相步进电机的了解,我对它进行了开端的测验,便是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线别离和别的 四根线(红、兰、白、橙)顺次触摸,发现每触摸一下,步进电机便滚动一个视点,来回五次,电机刚好转一圈,阐明此步进电机的步进视点为 360/(4×5)=18度。地线与四线触摸的次序相反,电机的转向也相反。
此步进电机,则只需别离顺次给四线必守时刻的脉冲电流,电机便可接连滚动起来。
经过改动脉冲电流的时刻距离,就可以完成对转速的操控;经过改动给四线脉冲电流的次序,则可完成对转向的操控。所以,规划了如下电路图:
C51程序代码为: 代码一
#include static unsigned int count; static unsigned int endcount; void delay(); void main(void) {
count = 0; P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 0;
EA = 1; //答应CPU中止
TMOD = 0x11; //设守时器0和1为16位形式1
ET0 = 1; //守时器0中止答应 TH0 = 0xFC;
TL0 = 0x18; //设守时每隔1ms中止一次 TR0 = 1; //开端计数 startrun: P1_3 = 0; P1_0 = 1; delay();
P1_0 = 0;
P1_1 = 1; delay(); P1_1 = 0; P1_2 = 1; delay(); P1_2 = 0; P1_3 = 1; delay();
goto startrun; }
//守时器0中止处理
void timeint(void) interrupt 1 {
TH0=0xFC;
TL0=0x18; //设守时每隔1ms中止一次 count++; }
void delay()
{
endcount=2; count=0;
do{}while(count
将上面的程序编译,用ISP下载线下载至单片机运转,步进电机便滚动起来了,开端告捷!
声明:本文内容来自网络转载或用户投稿,文章版权归原作者和原出处所有。文中观点,不代表本站立场。若有侵权请联系本站删除(kf@86ic.com)https://www.86ic.net/fangan/dianlu/318489.html






