


0 导言
跟着社会生活的开展,人们对现在的印染品的要求也越来越高,特别是布疋与包装外壳,那么对现代印染工艺的要求也越来越高。跟着工艺的添加,对印染设备是个不小的应战,这里边最首要的是大型印染联合机中多电机的同步操控问题。
在印染设备中,电机的同步操控首要有3方面决议:一是处理器对张力传感器数据的处理速度,以及电机对张力传感器的反应速度;二是不同的电机组之间机械功用的差异以及它们发生的实时一起操控问题;三是操控单元与各电机组之间的通讯问题,包含速率,抗搅扰等。传统印染联合机的做法是选用单片机加AD/DA芯片进行数据的处理与履行,也有为了进步数据的处理才能而选用DSP加单片机的做法。跟着现在技能的开展,在研讨了依据ARM的CORTEX-M3内核的处理器加CAN总线的分总体系规划办法。
总操控器和单元操控器,选用ST公司推出的依据ARM公司Cortex-M3核的STM32F103芯片测验进行新的规划。这种规划在进步体系功用的基础上降低了本钱一起完成了与现有印染设备的对接问题。
1 体系规划
1.1 体系结构规划
依据现有印染职业的印染联合机的详细情况,首要针对其操控体系进行改善。
在大型印染联合机的规划中,首要考虑的是多电机的同步操控问题,需求确保布疋在传送的过程中要平稳,不能由于电机的不同步而形成张力过大然后使布疋过度拉伸,也不能由于张力的缺乏而形成布疋的褶皱。在大型印染联合机中依据工艺的杂乱与简略,需求同步的电机从8个到40多个不等,选用CAN总线网络确保了能够依据工艺的不同自主的扩展单元操控器的个数。体系规划框图如图1所示。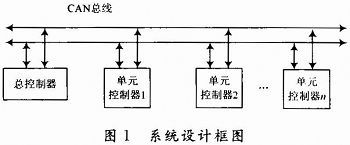
1.2 体系的组成
体系首要由主操控器,单元操控器,CAN总线网络,以及变频器组成。
主操控器是体系的主控单元,首要功用是显现和操控整个体系状况的作业状况,以及设置和调理体系的总要作业参数,如布速,张力传感器的灵敏度。和谐各单元操控的作业状况。
单元操控器的功用首要是微调张力传感器的灵敏度,实时监测个张力传感器的数据,依据各张力传感器的数据调理输出电压然后调理对应电机的作业状况,一起还要应对突发状况,例如张力传感器失灵的处理,以及电机失速的处理。
1.3 单元操控器的详细规划
在规划中我选用的是依据ARM的CORTEX-M3内核的芯片-STM32f103RCT6如图2所示。它的特色有:STM32F103系列微处理器是首款依据ARMv 7-M体系结构的32位规范RISC(精简指令集)处理器,供给很高的代码功率;作业频率为72MHz,内置高达256KB的FLASH存储器和48KB的SRAM。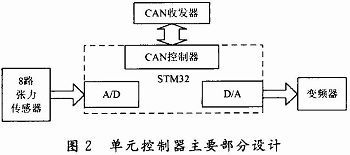
它内部集成了12位的A/D以及双通道的12位的D/A,还有专门面向工业操控的操控器区域网络(CAN),它供给兼容规范2.0A和2.0B(自动),位速率高达1 Mb/s。它能够接纳和发送11位标识符的规范帧,也能够接纳和发送29位标识符的扩展帧。具有3个发送邮箱和2个接纳FIFO,3级14个可调理的滤波器。
1.4 CAN总线接口规划
由于STM32的CAN总线操控器的逻辑电均匀选用LVTTL,所以选用德州仪器公司出产的CAN总线收发器SN65HVD230。SN65HVD230可用于较高搅扰环境下。它选用差分接纳,具有抗宽规模的共模搅扰、电磁搅扰才能。6N137构成的阻隔电路,这样就能够很好地完成CAN总线上各节点的电气阻隔。添加阻隔电路尽管添加了节点的杂乱性,但它却进步了节点的稳定性和安全性。此外,为防止信号反射,导致通讯的可靠性与抗搅扰才能下降,乃至无法通讯,因而,在CAN总线的两头需求加有2个120Ω的总线阻抗匹配电阻。CAN接口规划如图3所示。






