


摘要:为了得到轿车内行进过程中的横摆角速度与侧向加速度,规划了依据ARM微控制器和ADIS16355传感器的数据收集体系。介绍了该收集体系的作业原理和ADIS16355的SPI通讯协议。选用实车试验的办法得到了轿车的横摆角速度与侧向加速度,并且经过计算办法对收集到的数据进行了剖析。选用卡尔曼滤波办法对收集的数据进行了滤波,成功地滤除了白噪声,试验证明得到的数据是牢靠的。
关键词:ADIS16355;数据收集体系;SPI;卡尔曼滤波
导言
轿车的二自由度横摆角速度与侧向加速度这两个参数对轿车的稳定性剖析具有重要作用,是轿车自动安全的重要组成部分,可以经过猜测与实测两种办法取得。为了得到更实在的数据,本文规划了依据ARM微控制器和ADIS16355传感器的数据收集体系,经过实车测验得到了轿车的横摆角速度与侧向加速度的数据,剖析了搅扰源,并且对数据选用卡尔曼滤波办法进行处理。
1 体系作业原理
ADIS16355传感器装在挨近轿车的中心方位上(挨近轿车的质心方位),树立轿车的三维坐标系如图1所示。
即相当于从控制器的从机挑选端,在通讯过程中要使它一向坚持低电平,处于有用状况;然后,经过主控制器把需求收集信号的地址发送到从控制器中。SPI时序图如图4所示。
可是轿车运转中不可避免会遭到其他要素的搅扰,收集到的数据或许存在必定程度上的失真性,因此需求找出搅扰源的类型,然后挑选恰当的办法把杂波滤掉,得到相对精确的数据。为此规划轿车怠速与正常运转两种形式。轿车在怠速状况下,因为轿车是相对中止状况,理论上测到的轿车横摆角速度与侧向加速度为0,可是因为存在其他的搅扰要素,因此实践测得的数据并不为0。经过对测验数据的剖析可以得到搅扰源的类型,然后依据搅扰类型而规划出相应的滤波办法。下面别离就轿车的怠速形式与正常运转形式两种运动办法具体剖析。
3.1 轿车怠速形式
轿车怠速形式是指发动机处于发动状况,可是轿车处于中止不前的状况,可以测得相应的数据。这儿以轿车的横摆角速度数据进行剖析,取了2500个采样点,使用数据的计算特性对数据别离求均值、协方差与功率谱密度,求得的均值为-7.7682e-005,近似为0。为了直观,把收集到的源数据、协方差与功率谱密度经过MATLAB作图的办法显示出来,如图6所示。

由图可知,自相关函数只要在横坐标为0时分才有取值,功率谱密度散布比较均匀,并且收集到的数据均值近似为0,这与高斯白噪声的统汁特性类似,因此判定搅扰源类型为高斯白噪声。
3.2 轿车正常运转形式
轿车正常运转形式是轿车匀速行进在水平、下燥、水泥路面上,测得此刻的轿车横摆角速度与侧向加速度。从传感器收集到的数据不可避免地遭到搅扰源的影响,由上面给出的定论可知搅扰源类型为白噪声。卡尔曼滤波前的数据与滤波后的数据如图7所示。卡尔曼滤波对白噪声具有很好的滤波才能,它的滤波原理是最小均差原理,并且当时的数据只与前一个数据有关,数据存储量小,有利于计算机求解,所以选用卡尔曼滤波办法对收集到的数据进行滤波,然后得到相对精确的数据。这儿收集了10 000个数据点。
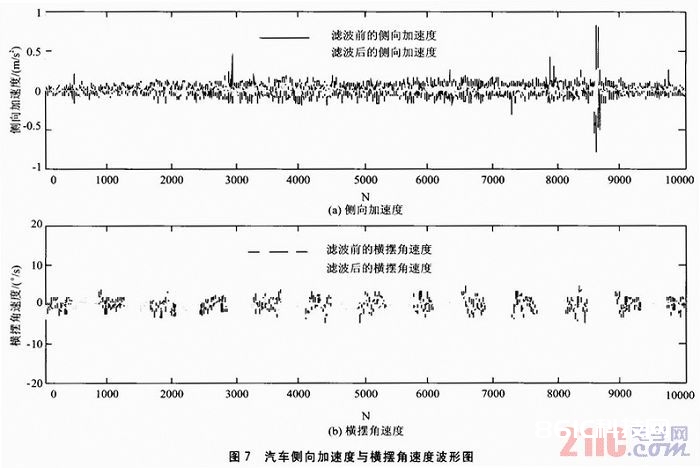
由图7可以看到,经过卡尔曼滤波后,曲线愈加滑润,有用地剔除了杂波,然后为控制体系供给更精确的数据。
结语
本文选用ARM微控制器和ADIS16355传感器规划了一种数据收集体系,不光可以收集轿车的横摆角速度与侧向加速度两个参数,并且用卡尔曼滤波办法对收集到的数据滤掉了杂波,使得到的数据更为精确。经剖析标明,该规划方案是可行的。这种数据收集体系在轿车自动安全方面有很好的使用价值,能为轿车稳定性剖析供精确的数据。






