


工业体系一般由微操控器和 FPGA器材等组成,美高森美(Microsemi )根据 SmartFusion2 SoC FPGA的马达操控解决计划是运用高集成度器材为工业规划带来更多优势的一个典范。本白皮书要点讨论用于工业体系的SmartFusion2系列器材的特性,以及这款器材在TCO(整体具有本钱)概念上比传统架构好的方面。
工业商场的最新开展一直在推进对高集成度的高功能、低功耗FPGA器材的需求,规划人员对网络通讯的偏好超越点对点通讯,这意味着通讯运用或许需求额定的操控器,间接地增大了资料清单(BOM)本钱、电路板尺度,以及相关的一次性工程(NRE)费用。TCO是用于剖析和评价的生命周期本钱的概念,它是与规划相关的一切直接和间接本钱的扩展。这些本钱包含工程本钱、装置和维护本钱、BOM、NRE (RD)本钱及其它,也或许通过考虑体系级因从来完成TCO最小化,然后带来可继续的长时刻获利才能。
美高森美供给具有ARM Cortex-M3微操控器硬核、IP集成,以及本钱优化封装,而且具有更小BOM清单和电路板尺度的SmartFusion2 SoC FPGA器材。凭仗低功耗特性和宽作业温度规模,这些器材可以在极点条件下牢靠作业,且无需电扇冷却。通过集成ARM Cortex-M3 IP 和 FPGA fabric,还可以完成更高的规划灵活性和更快的上市速度。美高森美可以供给多轴马达操控的多种参阅规划和IP生态体系,用于开发马达操控算法,然后简化从多处理器解决计划向单一器材解决计划,即向SoC FPGA器材的改变。
TCO影响要素
以下是影响体系TCO的一些要素。
1. 长生命周期
FPGA器材可以从头编程,即便布置在现场中也不破例,这样可以延伸产品生命周期,答应规划人员集中精力以更快的速度开发新产品。
2. BOM
美高森美根据flash 的FPGA器材无需扶引PROM或flash MCU在FPGA上电时载入数据,它们是零级(level zero)非易失性/即时敞开器材。与根据SRAM的FPGA器材不同,因为flash开关不会产生电压下降(brown out),美高森美根据flash的FPGA器材无需额定的上电监控器。
3. 上市时刻
OEM厂商之间的剧烈竞赛要求规划具有更多的产品差异化和更快的上市速度,供给多款通过测验的IP模块可以大幅削减规划时刻。商场已有多款构建工业解决计划所需的IP模块,一同,还有多款IP模块正在开发之中。SoC计划供给的另一项共同优势是调试FPGA规划,为了调试FPGA规划,可经由高速接口,运用微操控器子体系(MSS)来提取FPGA器材中的信息。
4. 工程东西本钱
一般都以为FPGA东西十分贵重,美高森美供给具有免费金(gold)答应授权的Libero体系级芯片(SoC)或集成开发环境(IDE),仅在开发高端设备时需求付费的答应授权。
工业驱动体系
工业驱动体系包含一个马达操控组件和一个通讯组件,马达操控组件包含驱动逆变器逻辑和维护逻辑。通讯组件则完成监控操控,担任施行运转时刻参数的初始化和修正。
在典型驱动运用中,或许运用多个操控器器材来施行驱动逻辑。一个器材或许履行与马达操控算法相关的核算,第二个器材或许作业与通讯相关的使命,第三个器材或许运转与安全相关的使命。

图1: 工业驱动体系
多轴马达操控
传统上的工业马达操控选用微操控器或数字信号处理(DSP)器材来运转马达操控所需求的杂乱算法。在大多数传统的工业驱动中,FPGA器材与微操控器或DSP一同用于数据收集和快速动作维护。除掉数据收集、脉宽调制(PWM)生成和维护逻辑,传统上,FPGA器并未在施行马达操控算法方面发挥着重要作用。
这种办法运用微操控器或DSP来施行马达操控算法,并不简单扩展至操控超越一个在独立速率下(多轴马达操控)运转的马达,美高森美SmartFusion2器材可以运用单一器材来施行完好的集成式多轴马达驱动操控。
操控方面可以分为两个部分,一部分是与运转磁场定向操控(FOC)算法、速度操控、电流操控、速度预算、方位预算,以及PWM生成相关,另一部件则包含速度曲线、负载特性、进程操控,以及维护(毛病和警报)。履行FOC算法是时刻要害的使命,而且要求在极高的采样速率下施行(在微秒规模内),尤其是具有低定子电感的高速马达,这就需求在FPGA器材中施行FOC算法。进程操控、速度曲线,以及其它维护无需快速更新,因此,可以在较低的采样速率下进行(在毫秒规模内),而且可以在内置Cortex-M3处理器中进行编程。
晶体管开关周期在驱动中发挥着重要作用,假如FOC 回路履行时刻比开关阶段缩短许多,可将硬件模块重用于核算第二个马达的电压,这意味着在相同的本钱下器材的功能更好。
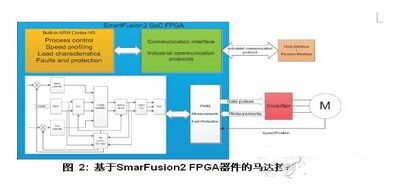
图 2: 根据SmarFusion2 FPGA器材的马达操控
马达操控IP模块
PI操控器
份额积分(PI)操控器是用于操控体系参数的反应机制,PI操控器具有两个可调理的增益参数,用于操控操控器的动态呼应——份额增益常数和积分增益常数。PI操控器的份额重量是份额增益常数和差错输入的乘积,而积分重量则是累积差错和积分增益常数的乘积。然后,这两个重量相加。PI操控器的积分阶段会导致体系不稳定,这是因为数据值不行操控的添加。这种不行操控的数据添加称为卷积(wind-up),一切PI操控器施行计划包含一个抗卷积 (anti-windup)机制,用于保证操控器输出是有限的。美高森美PI操控器IP模块运用坚持饱满(hold-on-saturation)算法来完成抗卷积,这个模块还供给设置初始输出值的附加特性。
图3所示为无刷FOC算法框图,这些模块作为IP core以供运用,本节将会逐个对他们展开讨论。
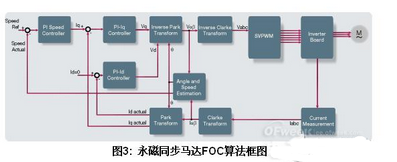
图3: 永磁同步马达FOC算法框图






