


引 言
微操作已在许多运用范畴得到了运用,特别是在纳微米级的定位体系中,要求传感器能检测出细小的力和位移的信息。现在用于微位移检测的原理较多,如光学式、磁和电感式、电容式和压电式等,但这些大多不便运用于机器人对细小的多维力和位移信息的获取。为了将技能老练的多维力传感器用于微力和微位移信息获取,中科院合肥智能所机器人传感器实验室在改造多维力传感器结构参数的一起,充分运用德州仪器(TI)的MSC1210单片机的许多新特性,如其自带的8路24位高精度ΣΔ A/D转化器、可编程增益扩大(PGA)和滤波器等,完结了对力和位移的高精度丈量。本文首要从微型机的运用视点打开讨论,期望能为进步传感器的集成化程度、分辨率、安稳性和人机交互才能作出一点奉献。
1 、多维力传感器特色与MSC1210简介
微位移传感器结构首要学习实验室的机器人六维手段传感器结构特色,在规划中相同选用双E型膜片结构。首要用改善的二维力传感器来检测作用于物体上的X和Y两维上的力信息,再将其换算成平面的位移信息。一起,它在机器人六维力传感器基础上改动了相关的结构参数,如量程和国家自然科学基金项目。赞助号:60343006,60375027。灵敏度等,以便完结对细小的力和位移信息的获取。
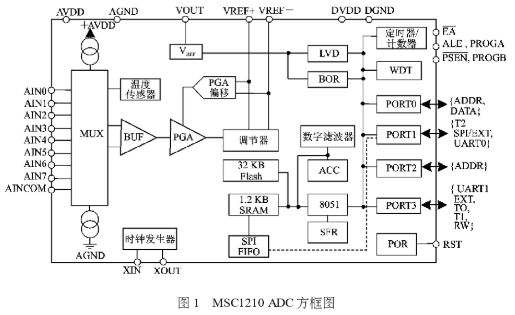
美国德州仪器公司(Texas Instruments)新推出了一种功用很强的带24位A/D转化器的微处理器MSC1210。MSC1210具有一些增强特性,特别合适丈量高精度温度、压力传感器等输出的弱小信号。MSC1210首要包含增强型8052微操控器中心、闪存、高功用模仿功用和高功用外设。增强型8052微操控器中心包含双数据指示器,履行指令的速度比规范8052中心快3倍。这种MIPS功用运用户能够依据特别需求优化速度、功率及噪声。图1是MSC1210 ADC 的方框图。
高精度微位移传感器电路模块的中心是MSC1210单片机。它完结弱小信号的多路切换、信号缓冲、PGA编程扩大、24位ΣΔ A/D转化、数字滤波、数据处理、信号校准以及UART通讯等功用。以下结合微位移传感器的运用作扼要介绍。
MSC1210 输入复用器比一般ADC 灵敏,它的每个输入引脚均可针对特定的丈量而装备成正输入或负输入。与发动ADC 部件一般界说输入对比较,MSC1210 可把一个引脚界说为负输入,把另一个界说为正输入,使规划便利自在。微位移传感器一组桥路输出别离接MSC1210 ADC的AIN0与AIN1,作为一路差分输入;另一组桥路输出别离接MSC1210 ADC的AIN2与AIN3,作为第二路差分输入。ADMUX寄存器初始化赋值为:ADMUX=0x01。
依照TI公司的MSC1210的数据阐明,输入缓冲器可下降ADC 丈量中偏移的可能性。只需输入信号的特征答应,就应该选用它。专一不选用输入缓冲器的状况是,其间一个模仿输入上的最大电压低于正轨电压高于1.5 V。不带缓冲器时,MSC1210 的输入阻抗是5 MΩ/PGA。启用缓冲器时,该阻抗一般为10 GΩ。输入电压规模缩小,一起模仿电源电流升高。在不是上述“专一”的状况下,实验中并没有运用缓冲,而是清零ADC 操控寄存器(ADCON0.3) 中的BUF 位,即封闭缓冲,获得的作用却较为抱负,传感器的零点输出误差改动较小。
可编程增益扩大器(PGA) 的增益可设置为1、2、4、8、16、32、64 或128。运用PGA 可大大进步ADC 的有用分辨率。当然增益设置要合理,不然噪声也随之扩大了。实验中微位移传感器的增益设置为64(精确地说,应该是MSC1210 ADC的PGA的增益)。
MSC1210数字滤波器有快速树立、sinc2 或sinc3三种,还有一个主动形式 。在输入信道或PGA改动后,主动形式可把sinc 滤波器修正到最佳的可用选项。在切换到新的信道后,它可把快速树立滤波器用于下两次转化,其间的第一次转化应被扔掉。然后,运用sinc2、随后运用sinc3 滤波器来进步噪声功用。这种操作能够一起交融sinc3 滤波器的低噪声优势和快速恢复时刻滤波器的快速呼应。数字滤波器中的sinc是数字滤波器中FIR滤波器的一种,常用在ΔΣ的ADC。当输入信道忽然改动时,输出需求必定时刻来正确表明新的输入。所需求的时刻取决于所选用的滤波器的类型。sinc2一般代表需求2个周期的数据输出时刻,sinc3代表需求3个周期的数据输出时刻,其他需求1个周期的数据输出时刻。浅显地说,若选用sinc3滤波器,则当输入信道改动后,最早采样输出的3个数据不能运用,应该扔掉;只要第4个输出数据是可运用的。这一点至关重要。
MSC1210既能够选用内部参阅电压,也能够选用外部参阅电压。参阅电压的开机装备是内部 2.5 V。通过ADCON0寄存器能够挑选参阅电压。实验中启用了内部参阅电压,通过设置ADCON0.4 (VREFH)挑选为 1.25 V。需求留意的是,启用内部 VREF并不会消除外部衔接需求。REFOUT引脚有必要仍衔接到 VREF+,而 VREF-有必要仍衔接到 AGND,以便内部 VREF能够正常操作。因为篇幅约束,MSC1210 ADC的其他功用在此不作介绍。
2、 传感器的硬件组成
因为MSC1210 ADC的高度集成化,硬件体系构成很简练。图2是微位移传感器的部分作用图。应变电阻片通过特别的工艺,而且依照特定的方向被粘贴到E型膜片的表面上,衔接组成两组主动解耦的惠斯通全桥电路,作为原始的力信息的模仿输出。细巧的电路板被放置于圆形的孔径之中。
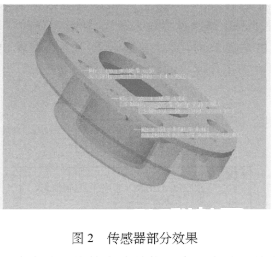
图3为实验体系的电路结构暗示。实验体系首要由传感器本体(输出原始的模仿信号)、MSC1210中心、串口通讯电路和PC机组成。如前所述,微位移传感器一组桥路输出别离接MSC1210 ADC的AIN0与AIN1,作为一路差分输入;另一组桥路输出别离接MSC1210 ADC的AIN2与AIN3,作为第二路差分输入。MSC1210通过RS232与PC机通讯,完结信息的显现和对MSC1210的操控。

3、 MSC1210数据收集体系的软件规划
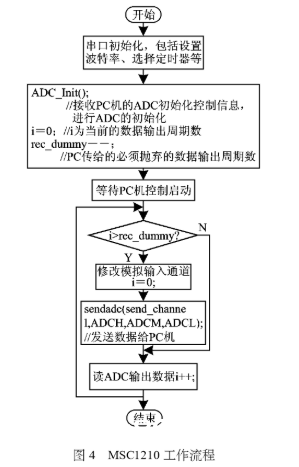
对MSC1210 ADC的各个操控字的设置将会极大地影响传感器的终究分辨率和安稳性。例如,输入缓冲器运用与否、可编程扩大器增益的挑选、调制器时钟速度挑选(决议模仿采样率以及滤波器类型的挑选)等,这些参数的设定都不是一次完结的,有些要通过重复的组合、测验,终究得到满足的成果。为了防止每次修正程序后有必要从头下载到Flash程序存储器中,MSC1210在作业之前的ADC的初始化作业由PC机彻底操控。首要,PC机将各种必要的操控信息通过串口传给MSC1210,MSC1210依据这些信息来进行ADC的初始化作业。具体地说便是,PC机向MSC1210发送6个字节,这6个字节中包含了滤波器类型、ACLK、ADCON2和ADCON3寄存器中的抽样值、修正模仿输入信道后的延时值、有必要扔掉的数据输出周期数和可编程扩大器的增益。然后,MSC1210发动ADC的初始化作业。进入正常作业状况后,假如发现当时数据输出周期数已大于预先设置的有必要扔掉的数据输出周期数,MSC1210就以为这个输出数据及其今后的输出数据都是有用的了,但它并不立刻将数据发送给PC机,而是要立刻修正模仿输入通道,然后再使前一输入通道的输出是无效的,紧接着进入下一个数据输出周期。MSC1210的作业流程可简单用图4表明。
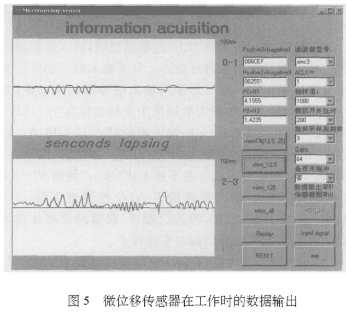
PC机除对MSC1210 ADC的初始化操控外,首要担任将MSC1210通过RS232串口发送上来的数据用可视化的图形实时地显现于窗口恰当方位。每次MSC1210向PC机发送4个字节。这4个字节是如下界说的:第1个字节表明传感器的通道号,0表明AIN0与AIN1差分输入,即X维的信息;1表明AIN2与AIN3差分输入,即Y维的信息。后三个字节是输出数据的24位二进制表明,是MSC1210 ADC的转化成果。当PC机处理进程检测到输入缓冲区满4个字节后,读取缓冲区的数据,一起清空输入缓冲区。依据第1个字节辨认通道后,将数据转化为电压值后显现到相应方位(单位:mV),而且在窗口中拓荒两块图形显现区域,别离实时显现X轴和Y轴的信号改动状况。为了更好地观测到信号的细小改动,进程供给了图形的扩大显现功用。为了便利,扩大倍数可选为12.5倍和125倍。图5为PC机与MSC1210的交互界面。
4、 实验成果
通过重复实验,结合实际的要求,终究把微位移传感器的数据输出率定位在10 Hz,分辨率高达15位,具有很高的安稳性,获得了杰出作用。相关参数挑选如下:MSC1210的滤波器类型为sinc3,ACLK为1,ADCON2和ADCON3寄存器中的抽样值设为1080,将模仿输入缓冲封闭,模仿输入通道改动后扔掉3个数据输出周期,选用偏移和增益内部自校对。图5便是微位移传感器在作业时的数据输出的图形显现,两条曲线别离表明其在X轴和Y轴上的受力状况。依据力信息能够便利地计算出位移信息。
此次在中科院合肥智能所机器人传感器实验室多维力传感器技能的基础上,运用MSC1210的优势研制成功的微位移传感器,具有体积小、分辨率高、安稳功用好等长处。MSC1210单片机是完好的SoC体系,是功用强大的数据收集芯片,能够广泛运用于仪器仪表、测控和导航等范畴。
责任编辑:gt






