


陀螺仪是用来丈量角速率的器材,在加速度功用根底上,能够进一步开展,构建陀螺仪。
陀螺仪的内部原理是这样的:对固定指施加电压,并替换改动电压,让一个质量块做振荡式来回运动,当旋转时,会发生科里奥利加速度,此刻就能够对其进行丈量;这有点相似于加速度计,解码办法大致相同,都会用到放大器。
角速率由科氏加速度丈量成果决议
-科氏加速度=2×(w×质量块速度)
-w是施加的角速率(w=2πf)
经过14kHz共振结构施加的速度(周期性运动)快速耦合到加速度计结构
-科氏加速度与谐振器具有相同的频率和相位,因而能够抵消低速外部振荡
该机械体系的结构与加速度计相似(微加工多晶硅)
信号调度(电压转化偏移)选用与加速度计相似的技能
施加改变的电压来回移动器材,此刻器材只要水平运动没有笔直运动。假如施加旋转,能够看到器材会上下移动,外部指将感知该运动,然后就能拾取到与旋转相关的信号。
上面的动画,仅仅笼统展现了陀螺仪的作业原理,而实在的陀螺仪内部结构是下面这个姿势,别不小心误会了哦~
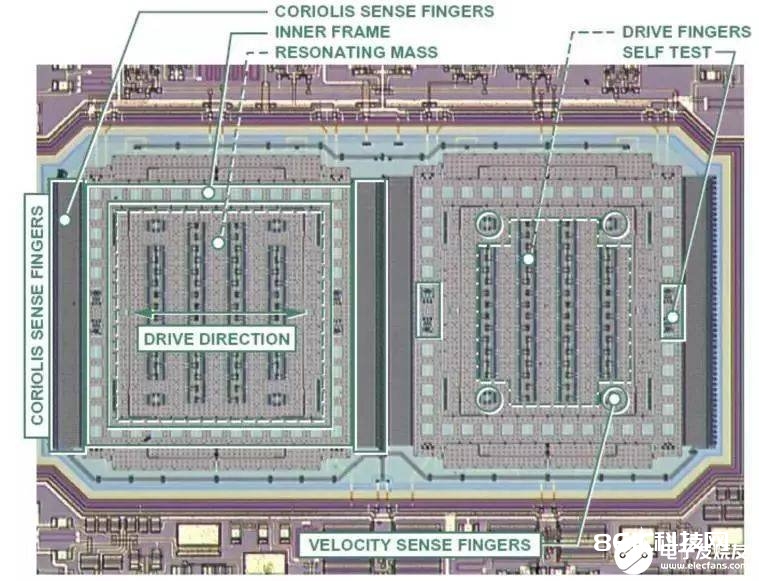

PS:陀螺仪能够三个一同规划,别离对应于所谓翻滚、俯仰和偏航。任何了解航空器的人都知道,俯仰是指航空器的上下方向,偏航是指左右方向,翻滚是指向左或向右翻滚。要正确操控任何类型的航空器或导弹,都需求知道这三个参数,这就会用到陀螺仪。它们还常常用于轿车导航,当轿车进入地道而失掉GPS信号时,这些器材会记载您的行迹。
无人机在飞翔作业时,获取的无人机印象通常会带着配套的POS数据。然后在处理中能够愈加便利的处理印象。而POS数据首要包括GPS数据和IMU数据,即歪斜拍摄丈量中的外方位元素:(纬度、经度、高程、航向角(Phi)、俯仰角(Omega)及翻滚角(Kappa))。
GPS数据一般用X、Y、Z表明,代表了飞机在飞翔中曝光点时间的地理位置。
飞控是由主控MCU和惯性丈量模块(IMU,InerTIalMeasurementUnit)组成。IMU供给飞翔器在空间姿势的传感器原始数据,一般由陀螺仪传感器/加速度传感器/电子罗盘供给飞翔器9DOF数据。
IMU中的传感器用来感知飞翔器在空中的姿势和运动状况,这有个专有名词叫做运动感测追寻,英文MoTIonTracking。运动感测技能首要有四种根底运动传感器,下面别离阐明其进行运动感测追寻的原理。
微机电体系(MEMS)
IMU中运用的传感器基本上都是微机电体系(MEMS),是半导体工业中非常重要的一个分支。
微机电体系(MEMS,Micro-Electro-MechanicalSystem)是一种先进的制作技能渠道。微机电体系是微米巨细的机械体系,是以半导体制作技能为根底开展起来的。
咱们的四轴飞翔器上用到的加速度陀螺仪MPU6050,电子罗盘HMC5883L都是微机电体系,归于传感MEMS分支。传感MEMS技能是指用微电子微机械加工出来的、用灵敏元件如%&&&&&%、压电、压阻、热电耦、谐振、地道电流等来感触转化电信号的器材和体系。
加速器(G-sensors)
加速器可用来感测线性加速度与歪斜视点,单一或多轴加速器可感应结合线性与重力加速度的起伏与方向。含加速器的产品,可供给有限的运动感测功用。
加速度计的低频特性好,能够丈量低速的静态加速度。在咱们的飞翔器上,便是对重力加速度g(也便是前面说的静态加速度)的丈量和剖析,其它瞬间加速度能够疏忽。记住这一点对姿势解算交融了解非常重要。
当咱们把加速度计拿在手上随意滚动时,咱们看的是重力加速度在三个轴上的分量值。加速度计在自由落体时,其输出为0。为什么会这样呢?这儿涉及到加速度计的规划原理:加速度计丈量加速度是经过比力来丈量,而不是经过加速度。
陀螺仪(Gyros)
陀螺仪是使用高速回转体的动量矩灵敏壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测设备。使用其他原理制成的角运动检测设备起相同功用的也称陀螺仪。
陀螺仪可感测一轴或多轴的旋转角速度,可精准感测自由空间中的杂乱移动动作,因而,陀螺仪成为追寻物体移动方位与旋滚动作的必要运动传感器。不像加速器与电子罗盘,陀螺仪不须凭借任何如重力或磁场等的外在力气,能够自主性的发挥其功用。所以,从理论上讲只用陀螺仪是能够完结姿势导航的使命的。
陀螺仪的特性便是高频特性好,能够丈量高速的旋转运动。缺陷是存在零点漂移,简单受温度/加速度等的影响。
电子罗盘(E-Compasses)
电子罗盘也叫数字指南针,磁力计,是使用地磁场来定北极的一种办法。现在一般有用磁阻传感器和磁通门加工而成的电子罗盘。
电子罗盘可由地球的磁场来感测方向。运用电子罗盘的消费性电子产品使用,包括在手机的地图使用程序显现正确方向,或为导航使用程序供给前进方向数据。但是,电子设备或建筑材料的磁场搅扰,比地球磁场来得强,导致电子罗盘传感器的输出值,较简单遭到各种环境要素的影响,特别在室内更是如此,因而,电子罗盘需要透过频频的校对,才干保持前进方向数据的准确度。
压力传感器(Barometers)
压力传感器又名做气压计,会藉由气压的改变来感测物体的相对与绝对高度,常被运用于与运动、健身、方位估测等使用有关的消费性产品中,例如,可感测运用者的移动层楼,调整地图信息。
IMU数据首要包括了:航向角(Phi)、俯仰角(Omega)及翻滚角(Kappa)三个数据。
1、航向角(Phi)
航向角英文缩写是:Phi。界说为:飞机和航天飞机的纵轴与地球北极之间的夹角。
示意图如下图所示:
2、俯仰角(Omega)
俯仰角英文缩写是:Omega。界说为:平行于机身轴线并指向飞翔器前方的向量与地上的夹角。
示意图如下:

3、翻滚角(Kappa)
翻滚角又名侧滚角,英文缩写是Kappa。界说为:光轴与十周之间的夹角。
示意图如下图所示:







