


太阳能是已知的最原始的动力,它洁净、可再生、丰厚,并且散布规模广,具有十分宽广的运用远景。但太阳能运用功率低,这一问题一向影响和阻止着太阳能技能的遍及,怎么进步太阳能运用设备的功率,始终是人们关怀的论题,太阳能主动盯梢体系的规划为处理这一问题供给了新途径,然后大大进步了太阳能的运用功率。
盯梢太阳的办法可归纳为两种办法:光电盯梢和依据视日运动轨道盯梢。光电盯梢是由光电传感器件依据入射光线的强弱改变发生反应信号到核算机,核算机运转程序调整采光板的视点完结对太阳的盯梢。光电盯梢的长处是灵敏度高,结构规划较为便利;缺陷是受气候的影响很大,如果在稍长时间段里呈现乌云遮住太阳的状况,会导致盯梢设备无法盯梢太阳,乃至引起执行组织的误动作。
而视日运动轨道盯梢的长处是能够全天候实时盯梢,所以本规划选用视日运动轨道盯梢办法和双轴盯梢的办法,运用步进电机双轴驱动,通过对盯梢组织进行水平、俯仰两个自由度的操控,完结对太阳的全天候盯梢。该体系适用于各种需求盯梢太阳的设备。该文首要从硬件和软件方面剖析太阳主动盯梢体系的规划与完结。
体系总体规划
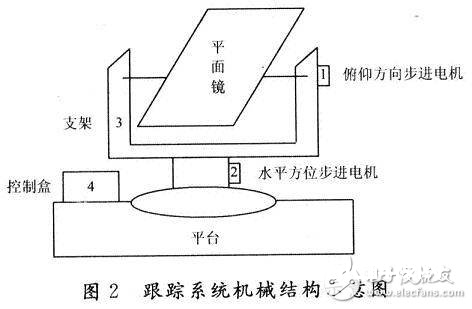
本文介绍的是一种依据单片机操控的双轴太阳主动盯梢体系,体系首要由平面镜反光设备、调整执行组织、操控电路、方位限位电路等部分组成。盯梢体系电路操控结构框图如图1所示,体系机械结构示意图如图2所示。
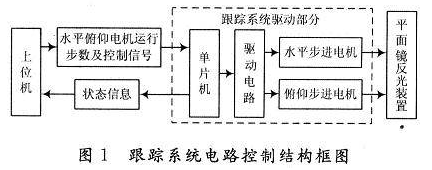
恣意时间太阳的方位能够用太阳视方位精确表明。太阳视方位用太阳高度角和太阳方位角两个视点作为坐标表明。太阳高度角指从太阳中心直射到当地的光线与当地水平面的夹角。太阳方位角即太阳地点的方位,指太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的暗影与正南方的夹角。体系选用水平方位步进电机和俯仰方向步进电机来追寻太阳的方位角和高度角,然后能够实时精确追寻太阳的方位。上位机担任恣意时间太阳高度角和方位角的核算,并运用软件核算出当前状况下俯仰与水平方向的步进电动机运转的步数,将数据送给盯梢体系驱动器,单片机接纳上位机送来的数据,驱动步进电机的运转。体系具有完结复位、水平方位的调整,俯仰方向的调整,太阳的盯梢及手动校准等功用。
硬件电路规划
1 盯梢体系驱动器接口电路
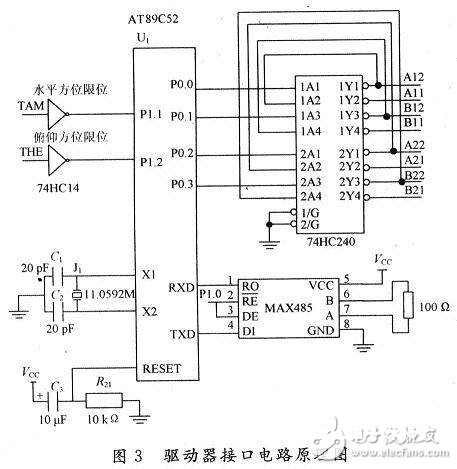
盯梢体系中微处理器选用89系列性价比高和功耗低的89C52。74HC14芯片是6非门施密特触发器,与P1.1和P1.2口相连,操控方位限位信号。74HC240芯片,八反相三态缓冲器/线驱动器,用于数据缓冲及总线驱动。体系运用两片74HC240芯片,通过P0口引脚操控,两片74HC240的16个输出引脚作为步进电机驱动电路的输入操控信号,别离操控步进电机俯仰方向和水平方位的正回转。体系与上位机的通讯选用MAX485接口芯片,由P1.0口操控其收发状况。驱动器接口电路如图3所示。
2 步进电机驱动电路
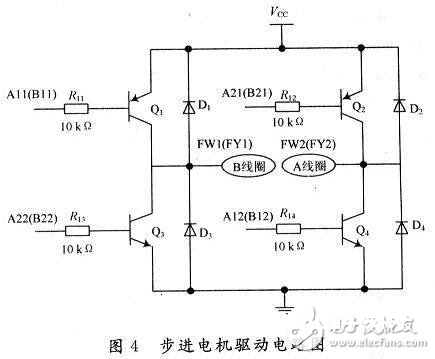
步进电动机是一种用电脉冲信号进行操控,并将电脉冲信号转换成相应角位移的执行器。在盯梢体系中,以74HC240的16个输出信号作为步进电机驱动器的输入操控信号,用以操控步进电机俯仰方向和水平方位的正回转。图4所示的是步进电机一路驱动电路图,体系共有四路驱动电路,别离驱动步进电机俯仰方向和水平方位的正回转。
其间,水平方位电机由D7,D6,D5,D4驱动;俯仰方向电机由D3,D2,D1,D0驱动。盯梢设备中步进电机选用42BYG250C型,步矩角1.8°。水平俯仰方向步进电机运转的最大视点是360°,共需运转20000步。减速器的传动比为1:100,即电机滚动100°时水平转台相应滚动1°。以步进电机1.8°的步距角核算,当镜面设备的水平转台滚动1°时,步进电机宣布100/1.8个脉冲,由此能够核算平面镜法向量的方位角为a时步进电机宣布的脉冲数为100α/1.8个。步进电机动作频率可手动设置,默许状况下,步进电机每隔15s动作一次。
3 限位信号收集电路
选用光电耦合器与电压比较器电路组成的微机步进电机限位电路,其电路图如图5所示。
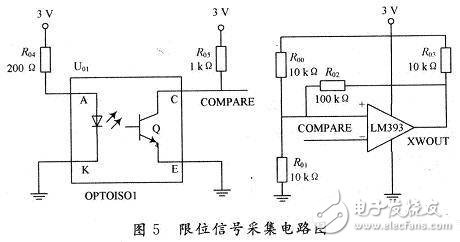
限位电路中运用双三态门来操控步进电机的脉冲通路。作业原理是:在抵达限位方位之前,光耦导通,电压比较器LM393的反向输入端有信号,答应步进电机操控脉冲从此通过。当限位杆抵达限位方位时,挡住了光耦的光通路,使LM393的反向输入端无信号,步进电机就中止。
软件规划
太阳主动盯梢体系的软件分为两部分,一是步进电机操控部分,首要由单片机完结。单片机的软件规划选用模块化规划的办法,首要分为如下几个软件模块:主程序模块、串行口中止处理模块、正常盯梢处理模块、串行口中止复位处理模块等。单片机主程序流程图如图6所示。
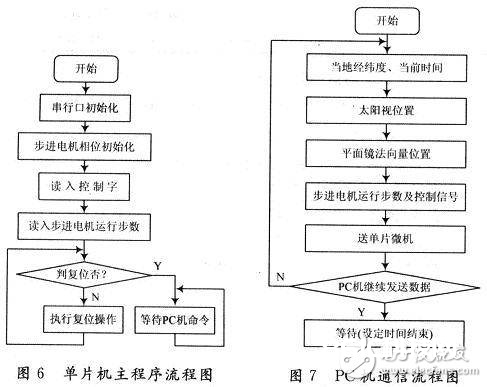
软件的另一部分为PC机部分,PC机软件部分首要是担任恣意时间太阳方位的核算并运用软件核算出当前状况下俯仰与水平方向步进电机运转的步数,并将数据送给盯梢体系驱动器。与单片机通讯的部分运用VC++中的MSComm控件来编译串口通讯的应用程序,选用MSComm32.OCX控件。运用控件的特点进行串口设置,运用控件的事情驱动进行串口呼应,运用控件的办法完结串行口接纳和发送数据。PC机通讯流程图如图7所示。
上位机操控体系具有完结复位、水平方位的调整,俯仰方向的调整,太阳方位的盯梢、手动校准及核算当日数据等功用。其间“设置”按钮,可进行当地经纬度、波特率、步进电机动作频率等的设置。上位机可执行程序操控界面如图8所示,图9所示的是操控主界面下“设置”按钮的对话框。
实验调查数据剖析
因为影响盯梢精度的要素许多,不只跟当地纬度、太阳赤纬角、太阳时角的取值有关,还跟步进电机的精度以及盯梢转台的机械结构有关,因此需求对盯梢轨道的程序进行校对。校对选用手动操作,通过操控水平俯仰方位步进电机,使两个轴带动平面镜反光设备滚动,一起不断调查平面镜反射太阳光的影子,当影子中心刚好聚在指定点时为最佳,记载下从原点到该点两轴的步进电机各自走过的步数,依据实践运转步数与理论运转步数之差,可核算得到视点之差,便是高度角和方位角的修正值。校对能够挑选任一天中几个不一起间进行。体系在实践运转时,调查到太阳在正午至下午3点期间,高度角方位角改变曲线存在显着拐点,改变比较显著,在此期间内体系对太阳方位的盯梢存在差错。
表1中列出了2009年1月12日正午至下午三时左右的理论数据,并用体系的手动校准功用,记载下不一起间的步进电机实践运转步数。
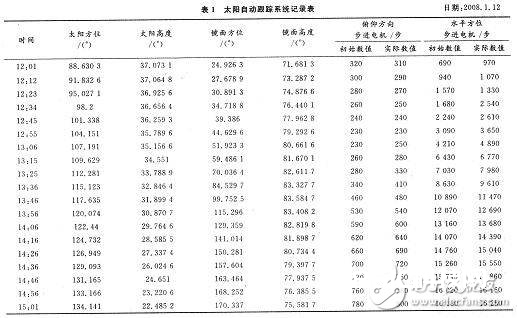
为了更精确地得到太阳实践方位的参数修正值,应在春夏秋冬四季中不一起间别离观测记载数据,将得到的一组高度角和方位角的校对值,拟合其曲线。用校对系数校对理论值存入操控程序,能够进步盯梢精度。
本文介绍的太阳主动盯梢设备能够有效地进步太阳能运用率,适用于各种需求盯梢太阳的设备。通过实验、测验和实践运用,各项目标均达到了规划要求。本文规划的太阳主动盯梢设备是依据视日运动规则,为使体系具有更高的盯梢精度,可选用光电传感器盯梢校对,构成由视日运动规则盯梢和传感器盯梢的混合盯梢体系。跟着太阳能主动盯梢设备的广泛应用,它定会有助于进步绿色动力运用的进程,为环境保护和进步公民的日子质量做出更大的奉献。






