


跟着产业结构的不断调整、生产工艺的飞速发展、人们日子水平的不断提高及家用电器的逐渐遍及, 商场对守时操控体系的需求越来越大。 如, 守时主动报警、守时主动打铃、守时开关烘箱、守时通断动力设备以及各种电气的守时发动等都归于守时操控体系[ 1] 。 守时操控体系的完结方法许多, 本文首要介绍以80C51 系列单片机中的AT89C51 为中心的智能守时操控体系的规划完结方法。 80C51 系列单片机进入商场时刻早, 总线敞开, 仿真开发设备多, 芯片及其开发价格低廉、速度较快、电磁兼容性较好。 本文所述智能时钟操控体系首要包含时钟显现、时刻校对、闹铃设置及各种设备守时开关机( 可扩展功用) 等功用。 实时日历和时钟显现的规划进程在硬件与软件方面进行同步规划。硬件部分首要由AT89S52单片机,LED显现电路,以及调时按键电路等组成,体系经过LED显现数据,所以具有人性化的操作和直观的显现作用。软件方面首要包含时钟程序、键盘程序,显现程序等。
咱们在日常日子中,常常碰到一些需求守时的作业,例如:印相或扩大相片,需求定在零点几秒的时刻,洗衣机洗刷衣物需求定在几分钟到几十分钟的时刻,电风扇需求定在数十分钟的时刻。完结这种守时的守时器有多种多样,在家用电器中选用机械守时器便是依据一般上弦挂钟原理规划的,这种守时器尽管结构简略,成本低,修理也比较便利,可是它的触头频频接触和断开,大大的缩减了它的运用寿命,也不利于进一步全主动化。在电子技能日新月异的今日,电子守时器必定会逐渐取而代之,这是显而易见的。
守时器的运用
守时器在家用电器中常常用于延时主动关机、守时。延时主动关机可用于:收音机、电视机、录音机、催眠器、门灯、路灯、轿车头灯、转弯灯以及其他电器的延时断电及延时自停电源等。守时可用于:照相守时曝光、守时亮光、守时扩大、守时调速、守时烘箱、冰箱门开守时报警、水位守时报警、延时催眠器、延时电铃、延时电子锁、接触守时开关等。例如:空调中的守时器,在作业一段时刻之后便能主动堵截电源中止作业。夏日夜间运用,入眠前先顶好时刻,等睡熟后到了预守时刻,空调主动关机。便利节能。守时器除了运用于家用电器外,还广泛地用于工业农业生产和服务设施,乃至军事等。
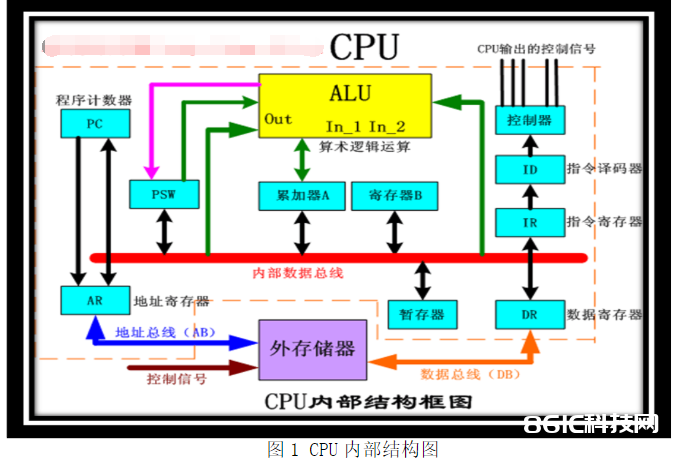
51单片机内部组织
51单片机内部有一个8位的CPU,一同CPU内部包含了运算器,操控器及若干寄存器如图(图1)所示。
计数原理
STC单片机内部设有两个16位的可编程守时器/计数器。可编程的意思是指其功用(如作业方法、守时时刻、量程、发动方法等)均可由指令来确认和改动。在守时器/计数器
中除了有两个16位的计数器之外,还有两个特别功用寄存器(操控寄存器和方法寄存器)。
从上面守时器/计数器的结构图中咱们能够看出,16位的守时/计数器分别由两个8位专用寄存器组成,即:T0由TH0和TL0构成;T1由TH1和TL1构成。其拜访地址依次为8AH-8DH。每个寄存器均可独自拜访。这些寄存器是用于寄存守时或计数初值的。此外,其内部还有一个8位的守时器方法寄存器TMOD和一个8位的守时操控寄存器TCON。这些寄存器之间是经过内部总线和操控逻辑电路连接起来的。TMOD首要是用于选定守时器的作业方法;TCON首要是用于操控守时器的发动中止,此外TCON还能够保存T0、T1的溢出和中止标志。当守时器作业在计数方法时,外部作业经过引脚T0(P3.4)和T1(P3.5)输入。
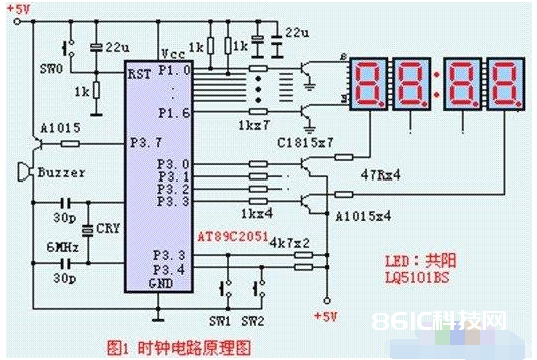
根据51单片机的守时器
在这儿,小编带你一同 从零开端学51单片机守时器。根据单片机的守时器电路原理图如下所示:
咱们学单片机是首要学的便是 LED 闪耀,那是用延时程序做的,现在回想起来,这样做不很恰当,为什么呢?咱们的主程序做了灯的闪耀,就不能再干其它的事了,莫非单片机只能这样作业吗?当然不是,咱们能用守时器来完结灯的闪耀的功用。
例 1:查询方法
ORG 0000H
AJMP START
ORG 30H
START:
MOV P1,#0FFH ;关所 灯
MOV TMOD,#00000001B ;守时/计数器 0 作业于方法 1
MOV TH0,#15H
MOV TL0,#0A0H ;即数 5536
SETB TR0 ;守时/计数器 0 开端运转
LOOP:JBC TF0,NEXT ;假如 TF0 等于 1,则清 TF0 并转 NEXT 处
AJMP LOOP ;否则跳转到 LOOP 处运转
NEXT:CPL P1.0
MOV TH0,#15H
MOV TL0,#9FH;重置守时/计数器的初值
AJMP LOOP
END AJMP LOOP
END
键入程序,看到了什么?灯在闪耀了,这可是用守时器做的,不再是主程序的循环了。简略地剖析一下程序,为什么用 JBC 呢?TF0 是守时/计数器 0 的溢出符号位,当守时器发生溢出后,该位由 0 变 1,所以查询该位就可知宇时时刻是否已到。该位为 1 后,要用软件将符号位清 0,以便下一次守时是间届时该位由 0 变 1,所以用了 JBC 指令,该指位在判 1搬运的一同,还将该位清 0。
以上程序是能完结灯的闪耀了,可是主程序除了让灯闪耀外,仍是不能做其他的事啊!不,不对,咱们能在 LOOP:……和 AJMP LOOP 指令之间刺进一些指令来做其他的作业,只需确保履行这些指令的时刻少于守时时刻就行了。那咱们在用软件延时程序的时分不是也能用一些指令来代替 DJNZ 吗?是的,可是那就要求你准确核算所用指令的时刻,然后再减去对应的 DJNZ 循环次数,很不便利,而现在只需求所用指令的时刻少于守时时刻就行,明显要求低了。当然,这样的方法仍是欠好,所以咱们常用以下的方法来完结。
程序 2:用中止完结
ORG 0000H
AJMP START
ORG 000BH ;守时器 0 的中止向量地址
AJMP TIME0 ;跳转到真实的守时器程序处
ORG 30H
START:
MOV P1,#0FFH ;关所 灯
MOV TMOD,#00000001B ;守时/计数器 0 作业于方法 1
MOV TH0,#15H
MOV TL0,#0A0H ;即数 5536
SETB EA ;开总中止答应
SETB ET0 ;开守时/计数器 0 答应
SETB TR0 ;守时/计数器 0 开端运转
LOOP: AJMP LOOP ;真实作业时,这儿可写恣意程序
TIME0: ;守时器 0 的中止处理程序
PUSH ACC
PUSH PSW ;将 PSW 和 ACC 推入仓库维护
CPL P1.0
MOV TH0,#15H
MOV TL0,#0A0H ;重置守时常数
POP PSW
POP ACC
RETI
END
上面的例程中,守时时刻一到,TF0 由 0 变 1,就会引发中止,CPU 将主动转至 000B处寻觅程序并履行,因为留给守时器中止的空间只需 8 个字节,明显不足以写下一切有中止处理程序,所以在 000B 处组织一条跳转指令,转到实践处理中止的程序处,这样,中止程序能写在恣意当地,也能写恣意长度了。进入守时中止后,首要要保存当时的一些状况,程序中只 演示了保存存 ACC 和 PSW,实践作业中应该依据需求将可能会改动的单元的值都推入仓库进行维护(本程序中实践不需保存护任何值,这儿只作个演示)。
上面的两个单片机程序运转后,咱们发现灯的闪耀非常快,底子分辩不出来,仅仅视觉上感到灯有些晃动罢了,为什么呢?咱们能核算一下,守时器中预置的数是 5536,所以每计 60000 个脉冲便是守时时刻到,这 60000 个脉冲的时刻是多少呢?咱们的晶体震动器 是12M,所以便是 60000 微秒,即 60 毫秒,因而速度对错常快的。假如我想完结一个 1S 的守时,该怎样办呢?在该晶体震动器濒率下,最长的守时也便是 65。536 个毫秒啊!上面给出 一个例程。
ORG 0000H
AJMP START
ORG 000BH ;守时器 0 的中止向量地址
AJMP TIME0 ;跳转到真实的守时器程序处
ORG 30H
START:
MOV P1,#0FFH ;关所 灯
MOV 30H,#00H ;软件计数器预清 0
MOV TMOD,#00000001B ;守时/计数器 0 作业于方法 1
MOV TH0,#3CH
MOV TL0,#0B0H ;即数 15536
SETB EA ;开总中止答应
SETB ET0 ;开守时/计数器 0 答应
SETB TR0 ;守时/计数器 0 开端运转
LOOP: AJMP LOOP ;真实作业时,这儿可写恣意程序
TIME0: ;守时器 0 的中止处理程序
PUSH ACC
PUSH PSW ;将 PSW 和 ACC 推入仓库维护
INC 30H
MOV A,30H
CJNE A,#20,T_RET ;30H 单元中的值到了 20 了吗?
T_L1: CPL P1.0 ;到了,取反 P10
MOV 30H,#0 ;清软件计数器
T_RET:
MOV TH0,#15H
MOV TL0,#9FH ;重置守时常数
POP PSW
POP ACC
RETI
END
先自己剖析一下,看看是怎样完结的?这儿选用了软件计数器的概念,思路是这样的,先用守时/计数器 0 做一个 50 毫秒的守时器,守时是间到了今后并不是当即取反 P10,而是将软件计数器中的值加 1,假如软件计数器计到了 20,就取反 P10,并清掉软件计数器中的值,否则直接回来,这样,就变成了 20 次守时中止才取反一次 P10,因而守时时刻就延长了成了 20*50 即 1000 毫秒了。
这个思路在工程中对错常有用的,有的时分咱们需求若干个守时器,可 51 中一共才有 2个,怎样办呢?其实,只需这几个守时的时刻有必定的公约数,咱们就能用软件守时器加以完结,如我要完结 P10 口所接灯按 1S 每次,而 P11 口所接灯按 2S 每次闪耀,怎样完结呢?对了咱们用两个计数器,一个在它计到 20 时,取反 P10,并清零,就如上面所示,另一个计到 40 取反 P11,然后清 0,不就行了吗?这部份的程序如下
ORG 0000H
AJMP START
ORG 000BH ;守时器 0 的中止向量地址
AJMP TIME0 ;跳转到真实的守时器程序处
ORG 30H
START:
MOV P1,#0FFH ;关所 灯
MOV 30H,#00H ;软件计数器预清 0
MOV TMOD,#00000001B ;守时/计数器 0 作业于方法 1
MOV TH0,#3CH
MOV TL0,#0B0H ;即数 15536
SETB EA ;开总中止答应
SETB ET0 ;开守时/计数器 0 答应
SETB TR0 ;守时/计数器 0 开端运转
LOOP: AJMP LOOP ;真实作业时,这儿可写恣意程序
TIME0: ;守时器 0 的中止处理程序
PUSH ACC
PUSH PSW ;将 PSW 和 ACC 推入仓库维护
INC 30H
INC 31H ;两个计数器都加 1
MOV A,30H
CJNE A,#20,T_NEXT ;30H 单元中的值到了 20 了吗?
T_L1: CPL P1.0 ;到了,取反 P10
MOV 30H,#0 ;清软件计数器
T_NEXT:
MOV A,31H
CJNE A,#40,T_RET ;31h 单元中的值到 40 了吗?
T_L2:
CPL P1.1
MOV 31H,#0 ;到了,取反 P11,清计数器,回来
T_RET:
MOV TH0,#15H
MOV TL0,#9FH ;重置守时常数
POP PSW
POP ACC
RETI
END






