文章转自ADI官网,版权归属原作者一切
简介
像歪斜传感器ADIS16209(见 附录)这样的传感器体系具有集成度高、规范全面的特色,选用紧凑型封装,而且价格合理,使体系开发人员能够轻松运用自己或许并不了解的传感器技能,然后将本钱和危险降至最低。由于精度是彻底按给定的功率电平确认,因而好像会束缚开发人员下降功耗的才能。可是,关于有必要严格管理能量运用的运用,选用周期供电的办法为下降均匀功耗供给了突破口。本文将要点评论周期供电及其对整体功耗的影响。
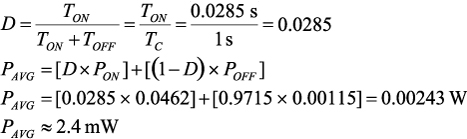
咱们中许多人都是在温馨的家庭环境中长大的,但爸爸妈妈总会冲咱们大喊:”脱离房间时把灯关上!咱们家不是开电厂的!”实际上,他们是在教会咱们一项重要的动力管理办法——周期供电,一种在不需求某项功用时封闭其电源的进程,例如在不需求进行丈量时封闭传感器体系。这样做能够下降均匀功耗,计算公式如下:
PON是体系处于正常作业状况时的功耗。POFF是体系处于封闭状况时的功耗。它与残留电流相关,如电源调节器要保持功率开关或关断办法所需的电流,其典型值在1 μA左右。敞开时刻(TON)是传感器体系敞开、进行所需丈量并从头封闭所需的时刻量。封闭时刻 (TOFF)取决于体系需求进行传感器丈量的频频程度。假如封闭功率远远小于敞开 功率,则均匀功耗实际上与占空比成正比。例如,假如封闭功率为零且占空比为10%,则均匀功耗为正常作业功耗的10%。
传感器体系总述
传感器可将温度、加速度或应力等物理量改变成电信号。为了合理运用这些电信号,传感器元件需求一些支撑功用,如鼓励、信号调度、滤波、失谐和增益调整以及温度补偿。高档传感器产品还包含模数转化,并在单封装中供给一切这些功用,然后完成完好且经过校准的传感器至数据位的转化功用。这类产品无需用户进行器材级规划或杂乱表征与校对运算,能够以更少的投入完成更短的规划周期。尽管高度集成的传感器产品可减轻进行电路级规划决议计划的担负,但假如期望运用周期供电来下降均匀功耗,仍有必要了解其内部作业原理。
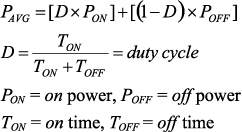
图1显现了许多完好传感器体系相关的功用。每个传感器元件都需求一个 接口电路来将元件中的物理改变转化为规范信号处理器材可用的电信号。例如,电阻应变计便是应力改动时阻抗发作改变的电阻,常以桥接电路的办法(带鼓励功用)将可变电阻转化成电信号。另一个比如是集成式微机电体系 (iMEMS®)惯性传感器,如加速度计和陀螺仪。它们选用小型结构,经过极板间位移改动导致电节点间电容改动,然后对惯性运动改变做出呼应。可变电容元件的接口电路一般运用调制级宽和调级组合,将电容改变改变成电信号。
缓冲级为模数转化器 (ADC)的输入级预备信号,可包含电平转化、增益、失调校对、缓冲和滤波功用。传感器信号经过数字化处理之后,数字处理功用便进一步添加信息值。数字滤波, h(n)则可下降噪声,要点重视方针频带。例如,机器健康状况检测体系或许经过一个带通滤波器来重视与一般机械设备磨损相关的频率特征。其他需求安稳的直流基准电压的传感器或许倾向于运用低通滤波器。
由于体系中许多其他器材的影响,传感器精度或许有很大的差异。为了缩短差错散布并进步丈量确认性,传感器体系一般包含一个校准程序,以确认各传感器在已知鼓励和条件下的特性,并供给特定单位公式来校对在一切预期作业条件规模内输出。终究处理级f(n)代表特定处理,例如用于将加速度计的静态地心引力丈量改变成方位角的三角联系。
周期供电考虑要素
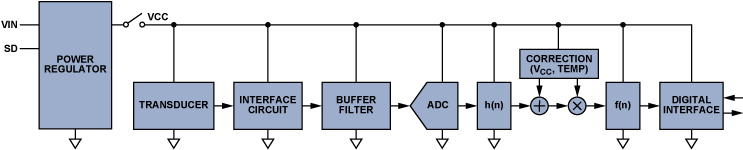
评价传感器体系中周期供电的有用性时,规划人员有必要清晰收集有用数据所花的时刻。图2显现供电时一个典型的传感器体系呼应。TM是丈量时刻,TC是周期时刻。丈量时刻取决于发动时刻T1、树立时刻T2和数据收集时刻T3.
发动时刻 取决于体系处理器,以及支撑传感器数据采样和信号处理操作所有必要运转的初始化程序。运用高度集成的传感器体系时,一般产品文档中会规则发动时刻。此类产品有时会供给休眠 办法,其发动时刻更快,但价值是其断电功耗比关断办法要高。
树立时刻 可包含传感器、接口电路、滤波器和物理器材的电气特性树立时刻,以及热树立时刻和机械树立时刻。某些情况下,这些过渡特性在上电时刻内树立,因而对整体丈量时刻影响很小,乃至没有影响。可是,剖析这些特性的最保存办法是假定这些景象是顺次发作的,除非进一步剖析研究能够支撑更有利的一起发动和树立假定。
数据收集时刻取决于所需数据样本的数量、体系处理器读取数据的速度,以及准确数据收集预备就绪后处理器能够开端作业的时刻。
剖析示例
本示例经过评价一个彻底集成的MEMS歪斜传感器来确认影响精度和丈量时刻的参数,然后清晰功率与功用的重要联系。以下四个进程对此进程供给了简略的指引:
- 了解传感器的作业原理。
- 经过产品文档获取相关信息。
- 评价未清晰规则的重要参数。
- 推算出功率与功用的联系。
1. 了解作业原理
示例的歪斜传感器体系与图1中的通用体系十分类似。MEMS加速度计包含传感器元件和接口电路。加速度计信号经过一个单极点低通滤波器,该滤波器将信号带宽约束在50 Hz。模数转化器以200 SPS的采样率运转,并将其输出送入数字处理级。数字处理功用包含一个均值滤波器、温度驱动器校对公式、将静态加速度计读数改变成歪斜角的数学函数、用户接口寄存器和一个串行接口。
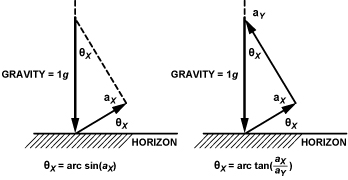
假定偏置差错为零,当加速度计的丈量轴与重力方向笔直时,其输出将为零。其丈量轴与重力方向平行时,将发作 +1 g 或 –1 g的输出,极性取决于方向。静态加速度计丈量与歪斜角之间的联系是一个简略的正弦或正切函数,如图3所示。这儿的剖析要点考虑水平办法(正弦)。
2.经过产品文献获取相关信息
表1列出了影响高档传感器体系周期供电的参数。这些参数一部分可从产品数据手册取得,而其他参数需求针对终端体系功用方针进行剖析。PON 和T1 是数据手册供给的参数。其他参数可用于估量T2 和 T3。封闭办法功率得自线性调节器的关断电流。
表1. 传感器体系技能目标
| 参数 | 值 |
| 电源电压 | +3.3 V |
| 功率,正常作业 | 46.2 mW (PON) |
| 功率,封闭办法 | 3.3 µW (POFF) |
| 功率,休眠办法 | 1.2 mW (POFFS) |
| 上电时刻 | 190 ms (T1) |
| 休眠办法恢复时刻 | 2.5 ms (T1S) |
| 加速度计规模 | ±1.7 g |
| 歪斜角规模 | ±30° |
| 低通滤波器 | –3 dB @ 50 Hz, 单极点 |
| 采样速率,数字滤波器 | 200 SPS,移动均匀, 256 最大值 |
3. 运用经历假定来量化其他影响要素
树立时刻影响一个传感器体系能够支撑的精度和丈量速率。许多不同的要素都会影响树立时刻,但这儿要点剖析电的要素。估量树立时刻需求功用方针、部分重要假定和一个用于剖析传感器对供电呼应的模型。第一项重要假定是滤波器在初始发动周期(上电时刻)之后树立。尽管这两个周期能够一起进行,但以接连发作的办法着手剖析是更为保存的办法。图4供给剖析传感器对供电呼应的简化模型。

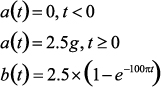
供电后,加速度计传感器的输出a(t)出现阶跃呼应。由于传感器选用单电源供电,其输出很或许会从零开端,并敏捷改变至确认其方位的电平。为简明起见,假定零输出与最低有用加速度水平相对应。这种情况下,咱们选用–2 g加速度,以便在最小额定值 –1.7 g的基础上供给一些裕量。一起,最大歪斜规模为+30°,相当于+0.5 g。将这两个距离结合,加速度计信号在发动时可进行的最大转化为+2.5 g。单极点、低通滤波器的阶跃呼应b(t)可经过以下公式取得:
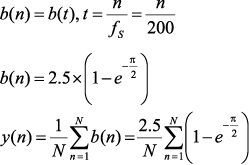
包含数字滤波器的模型需求离散办法的b(t), 以及一个总和模型来仿真滤波器。
树立时刻是在规则精度AE规模内安稳到终究值所需的时刻。图5显现两条瞬态呼应曲线,指示每条曲线到达0.1 g精度所需的树立时刻。
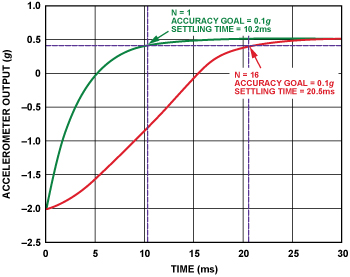
本例中,差错预算答应0.2°的树立精度。正弦公式供给一种将此方针改变成加速度衡量目标的简略办法。