


导言
为了更好地协助瞎子行走,各科研机构研发了各种电子导盲设备。传统电子导盲设备存在以下缺乏:运用一般电池,作业时刻短,需求频频替换电池;传感器受外界影响较大,勘探精度不高;操作杂乱,并且造价贵重。
超声波测距是一种非触摸式检测办法,运用其可测规模广,不受光线和被测物体色彩的影响等优势,能够处理许多问题,在工业操控、勘探丈量、精确定位和交通安全等范畴都有广泛的运用。现在超声测距完成便利,核算简略,简略完成实时操控,并且在丈量精度上能到达运用的要求,因而能够很好地运用于导盲器的研发中。
1、 超声波传感器及测距的原理
超声波是指频率高于20 kHz的机械波,超声波传感器是在超声波频率内将交变的电信号转化成声响信号或许将外界声场中的声响信号转变为电信号的能量转化器材,习惯上称为超声波换能器,或是超声波探头。超声波探头资料是压电晶体或压电陶瓷,这种探头统称为压电式超声波探头,运用压电资料的压电效应来作业的,其压电效应具有可逆性。逆压电效应是将高频脉冲转化成高频机械振荡,以发生超声波,可作为发射探头。正压电效应是将高频机械振荡转化成高频电脉冲,可接纳超声波信号,作为接纳探头。
超声波测距的原理一般是回波渡越时刻法,即检测从超声波发射探头发射的超声波,经空气介质的传达,与其遇到障碍物后发生回波,并被超声波接纳探头接纳的时刻差△t,即渡越时刻,求出声源到障碍物的间隔S,核算公式为:
S=v△t/2 (1)
式中v为某一温度下的超声波速。
2 、试验设备与操控办法
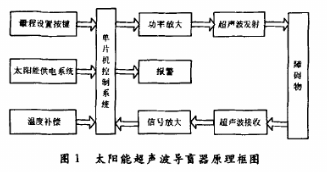
本项目研讨的太阳能超声波导盲器从功用上分为太阳能供电、语音报警、量程设置、温度检测、主操控体系等五个模块,其原理框图如图1所示。
太阳能电池板固定在导盲器支架顶端,经过驱动电路连接到可充电的镍氢电池为导盲器供给5 V直流电。超声波传感器和温度传感器固定在导盲器支架前端,别离连接到主操控电路上。运用时,先挑选量程,翻开开关,温度传感器检测环境温度,并将检测到的温度信号传输给单片机,单片机对超声波传达速度进行批改。在量程规模内,当超声波信号遇到障碍物时,信号被反射回来,并被超声波传感器接纳。信号发射到接纳的时刻差与障碍物的方位有关,单片机经过剖析超声波发射到回来的时刻差,能够核算出障碍物的间隔,并履行报警程序,语音报警声能够经过耳机接线口连接到耳机。
2.1 主操控模块
主操控模块主要由单片机进行操控,包含了超声波发射电路和超声波接纳电路,因为要完成远间隔丈量,而超声波在空气中传达,其能量会随传达间隔的增大而减小,从远间隔传达回来的信号比较弱,需求经过多级信号扩大。
2.1.1 超声波发射电路
发射电路主要由反向器74LS04和TCT40-1F超声波发射传感器构成,单片机P2.0端口输出的40 kHz方波信号一路经一级反向器后送到超声波传感器的一个电极,另一路经两级反向器后送到超声波传感器的另一个电极。输出端选用两个反向器并联,用以进步驱动才能。上拉电阻既能够进步反向器74LS04输出高电平的驱动才能,也能够增加超声换能器的阻尼效果,缩短其自由振荡的时刻。其原理图如图2所示。

2.1.2 超声波接纳电路
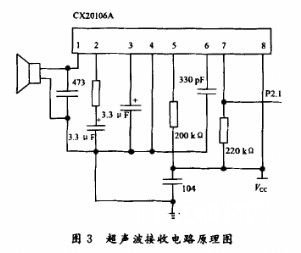
超声波接纳器选用与发射器相配对的TCT40-2S,将超声波调制脉冲转化为40 kHz的电压信号。集成电路CX20106A是一款红外线检波接纳的专用芯片,内置前置扩大器、限幅扩大器、带通滤波器、检波器、积分器、整型电路等。其间前置扩大器具有自动增益操控功用,可确保在超声波接纳较远反射信号而输出弱小电压时,扩大器有较高的增益,而在近间隔输入信号强时,扩大器不会过载。考虑到红外遥控常用的载波频率为38 kHz与测距的超声波频率40 kHz较为挨近,能够运用它制造超声波检测接纳电路,如图3所示。运用CX20106A接纳超声波,具有很高的灵敏度和较强的抗干扰才能。
2.2 温度补偿模块
因为超声波归于声波规模,其波速v与温度有关,声波速度受温度影响较大。其传达速度与温度T的关系为:

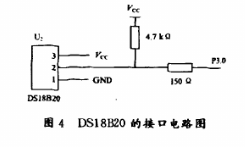
增加温度传感器,检测设备作业时的温度,将接纳到的温度信息传至单片机,对超声波的速度进行温度补偿,能够校对超声波的传达速度,进步丈量精确度。运用集成温度传感器DS18B20和AT89S52单片机为主体,能够构成一个高精度的数字温度检测体系,其电路如图4所示。DS18B20温度传感器,与传统的热敏电阻温度传感器不同,它能够直接读出被测的温度值,并且可依据实践要求,经过简略的编程,完成9~12位的A/D转化。因而,运用DS18B20可使体系结构更趋简略,一起可靠性更高。
2.3 语音报警模块
一般导盲器的报警办法比较简略,或许是单一的蜂鸣器报警,或许只要语音报警,二者都存在缺点。结合两种报警办法,设置蜂鸣器和语音芯片作为声响报警器,运用者若选用语音芯片,体系可依据间隔勘探的成果语音报出障碍物的间隔,也能够依据需求挑选蜂鸣器直接报警。在近间隔形式中,能够用蜂鸣器的频率来表明间隔的远近,远的时分选用低频率的蜂鸣声,近的时分选用频率高的蜂鸣声,运用者能够依据声音频率的凹凸快速精确地判别前方障碍物的大致间隔。在远间隔形式中,选用语音报警形式来表明前方障碍物的间隔,语音报警模块选用的语音芯片是WT588D。
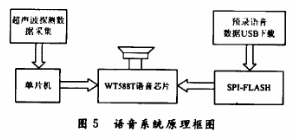
语音体系的原理框图如图5所示,分语音存储和语音播映两部分。体系运用单片机进行数据收集,经处理转化为可判别语音芯片播映哪段语音的判别信号。然后驱动耳机播映声响信号,运用WT588D VoiceChip软件能够对语音芯片进行批改、声响录入等操作。
2.4 量程设置模块
本设备预设远距、中距、近距三个量程用来操控报警的间隔,体系初始报警间隔为近距1 m,按中距和远距按键可别离将初始报警间隔设为3m和6m。
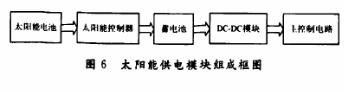
2.5 太阳能供电模块
经过太阳能光伏电池宣布的直流电驱动体系,并以可充电的镍氢电池作为积储太阳能发电板的剩下电力的设备。太阳能供电模块由太阳能电池、太阳能操控器、蓄电池和DC-DC转化器等组成,如图6所示。太阳能操控器能够操控蓄电池对太阳能的收集和贮存的作业状况,并对蓄电池起到维护效果,延伸蓄电池运用寿命。
3、 算法规划与试验成果剖析
3.1 算法规划
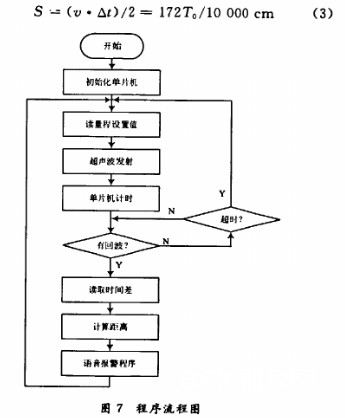
本设备软件的操控中心为AT89S52单片机,单片机经过读取量程设置值和温度值对初始设置状况进行批改,操控发射超声波,一起发动定时器计时,为了防止接纳传感器直接承受宣布的超声波,可在发射超声波后设置一段延时。当超声波勘探器勘探到回波时,计时器中止计时,读取时刻差,依据回波测距原理核算出障碍物间隔,并履行报警程序,程序流程图如图7所示。因为选用的是12 MHz的晶振,计数器每个计数便是1μs,当主程序检测到接纳成功的标志位后,将计数器T0中的数(即超声波来回所用的时刻)按式(3)核算,即可得被测物体与测距器之间的间隔S,假定温度为20℃,则对应声速v为344m/s,则有:
3.2 试验成果剖析
试验中选用一纸箱作为障碍物,将报警模块换为液晶显示器进行定量丈量,不同气温下在同一点方位丈量5个值,增加温度补偿和量程挑选,得到如表1所示成果。
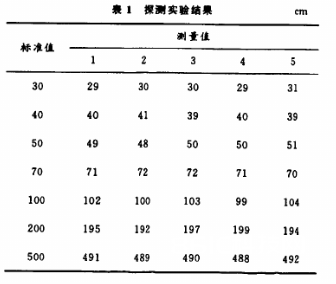
由此能够看出,本试验的相对差错较小,可是因为盲区的呈现,所测的成果不能与规范值彻底持平。并且当障碍物间隔比较近时,丈量精确性较高;障碍物较远时,精确性相对较低;这是因为间隔较远时,超声波回波信号较弱,噪声较大,简略发生差错。
4 、结语
现在导盲器的研讨较多,本试验提出的规划方案特色是以太阳能作为体系的动力来历,选用半导体数字温度传感器完成对单片机超声波测距体系的温度丈量和补偿,从而对声速进行补偿,对引起丈量差错的要素进行批改处理,能够进步导盲器的导盲精度及灵敏度。因为预留了单片机引脚,便于进行功用拓宽,一起导盲器体系以模块化进行拼装,适合增加其他功用模块。例如能够增加GPS定位器,能够协助瞎子家族及时了解瞎子的行迹,防止瞎子迷路。并且本规划具有操作简洁、体积较小等长处,因而能够很好地运用于实践生活中。
责任批改:gt






