


三相逆变器作为现在一种常用的电力电子设备,对输出电压操控体系需一同完成两个方针:高动态呼应和高稳态波形精度。比如PID、双闭环PID、状况反应等操控计划,虽然能完成高动态特性,可是不能满意高质量的稳态波形。
本文利选用双闭环PI和重复操控相结合的操控计划,首先用双闭环PI操控算法,得到高动态特性的三相交流电,不过不能满意高质量的稳态波形,由于用电压质量要求比较高的非线性负载———镇流器是电感式的钠灯作为三相逆变器的负载时,钠灯不能安稳的作业(会高频率地闪耀),针对这一问题,在双闭环PI的基础上加重复操控补偿,树立MATLAB 仿真,并在双DSP+FPGA 硬件架构中高效准确的完成。试验成果表明,加上重复操控补偿后,钠灯可以安稳的作业,三相逆变器的稳态功用得到了很大的改进。
1 、三相逆变器数学模型的树立
三相LC逆变器的主电路拓扑如图1,组成部分首要有三相逆变桥、三相滤波电感L、三相滤波电容C 。

图1 LC 三相逆变器的主电路拓扑
界说三相逆变器负载侧输出电压为uoA、uoB、uoC,输出电流为ioA、ioB、ioC,三相逆变器电感L 侧输入电压为uA、uB、uC,输出电压为uoA、uoB、uoC,流过电感的电流为iaL、ibL、icL。
以电感电流和输出电压为状况变量,树立在三相停止坐标系中的状况空间表达式如下。
状况方程为:
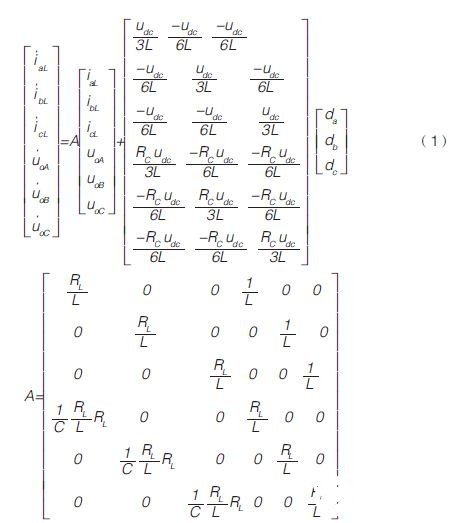
输出方程为:

dk-调度器输出的调制信号。
以上为三相逆变器的停止坐标系中的数学模型,下面评论其解耦模型。
引进如下三相停止坐标系到两相停止坐标系的改换关系式:
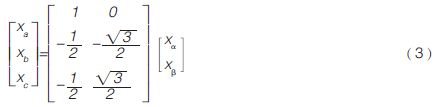
将式(3)代入式(1),即可得到在两相停止坐标系下操控目标的传递函数表达式如下:

从上面的操控目标的传递函数表达式可知,α轴和β轴现已彻底解耦,各自等效为单相半桥逆变器。
从上面的剖析可以看到:①在两相停止坐标系下,三相逆变器是彻底解耦的,可等效为两个单相半桥逆变器。②三相解耦后的模型与单相逆变器模型相同,所以三相逆变器的操控的剖析与规划办法可以学习单相逆变器。
2 双闭环PI操控器的规划
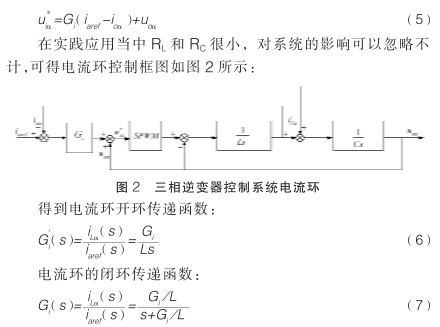
2.1 电流环操控器的规划
操控体系的内环的操控目标是滤波电感,特色是频带宽、呼应速度快,份额调度P即可以满意要求。别的,为了抵消结构电压负反应的影加上输出电压正反应:
(1)电流环份额调度器的规划过程1)看开环传递函数的波特图是否满意要求;2)看闭环传递函数的波特图是否满意要求。
(2)规划电流环截止频率时,有2条履行原则1)从操控体系内外环分工考量,为了加速动态呼应,电流环闭环截止频率要比外环的截止频率高且尽可能的高,并选用没有延时的份额调度;2)从操控体系的履行机构考量,电流内环闭环截止频率要比电力电子器件的开关频率低。三相逆变器的电感L=0.19mH,代入(8)式得到开环的幅频特性函数:

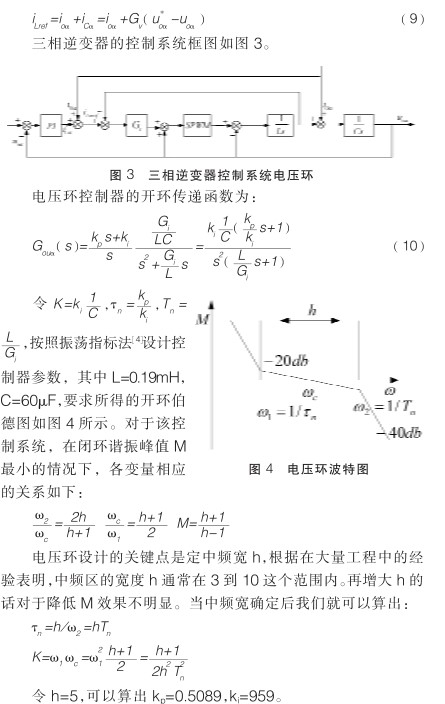
2.2 电压环操控器的规划
三相逆变器的外环电路选用电压负反应,为了抵消结构电流负反应的影响,加上输出电流负反应。可得:
3 依据重复操控补偿的高精度PID操控
3.1 重复操控原理
重复操控是日本的lnoue 于1981 年首先提出来的,其原理来源于内模原理,加到被控目标的输入信号除差错信号外,还叠加了一个“曩昔的操控差错”,该差错时上一周期该时间的操控差错。把上一次运行时的差错反映到现在,和“现在的差错”一同加到被控目标进行操控,这种操控办法,差错重复被运用,称为重复操控。通过几个周期的重复操控之后可以大大提高体系的盯梢精度,改进体系质量。
重复操控中,一般希望重复操控作用在高频段的增益减小。为此,在重复操控中常常参加低通滤波器Q(s)。本操控办法取:

3.3 重复操控补偿的PID操控仿真及其成果
剖析重复操控+双闭环PI在Simulink仿真中重复操控用的是Transport Delay模块,份额系数K取10,低通滤波器到频率取1500Hz 即

如图6,加上重复操控后从第3个周期开端输出信号yout跟能准确地盯梢输入信号rin,如图7,方位盯梢差错越来越小,在第4个周期差错不再减小。
4 双DSP+FPGA三相逆变器的硬件规划
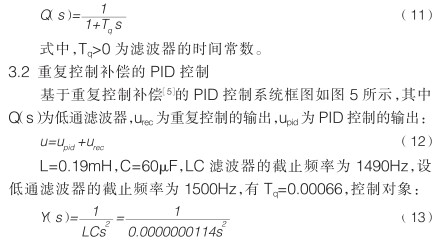
双DSP+FPGA 操控体系功用如图8。
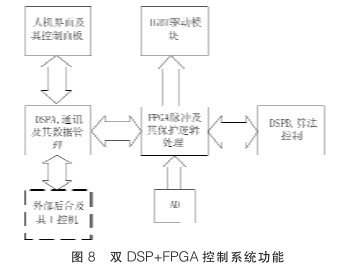
图8 为三相光伏逆变器的操控结构框图,逆变器的主控电路选用“双DSP+FPGA”结构,DSP 即数字信号处理器,选用Tl公司的TMS320F2812 芯片。FPGA 即现场可编程逻辑门阵列,选用XlLlNX公司的芯片。本规划选用的DSP芯片是一款定点型DSP,具有强壮的数据运算才能,主频最高达150MHz,广泛应用于操控范畴。FPGA具有强壮的逻辑运算才能,能并行快速进行多组逻辑判别,依据DSP 和FPGA 的功用特色,作以下功用分配,两片DSP芯片分别为DSPA、DSPB。
FPGA首要有四方面功用:一是操控AD 转化芯片,对外部CT/PT及调度电路后的电压电流信号进行模数转化并读取成果,一同把成果传送给DSPA 和DSPB; 二是作为DSPA和DSPB之间的数据交换通道;三是PWM 信号输出;四是进行毛病检测及IO输出。DSPA首要担任与人机界面通讯及数据管理。DSPA读取FPGA 中的电压电流数据和毛病状况等信息在人机界面中显现,以及传送人机界面中的指令。DSPB首要担任重复补偿操控+双闭环操控算法的完成,操控输出电压电流的安稳。
5 试验成果及其剖析
THD是查验逆变器功用的一个重要目标,本文用THD和带电感式镇流器的钠灯能否正常作业来验证三相逆变器的功用。5.1 THD 试验成果
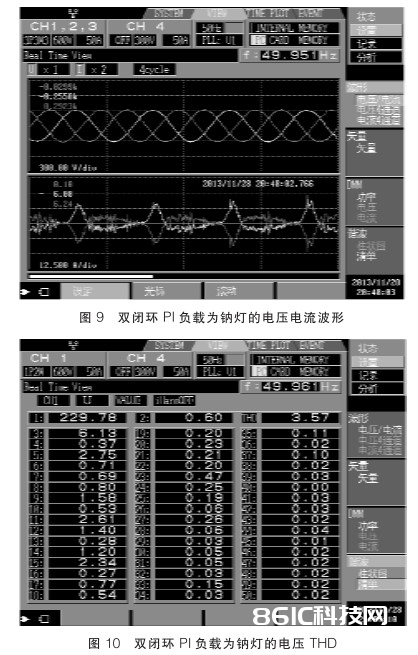
如图9 为双闭环PI操控算法带钠灯的电压电流波形,图10 为双闭环PI 操控算法的电压THD。用双闭环PI操控带钠灯,电压的THD比较大,为3.57%,并且负载电流畸变比较严重。
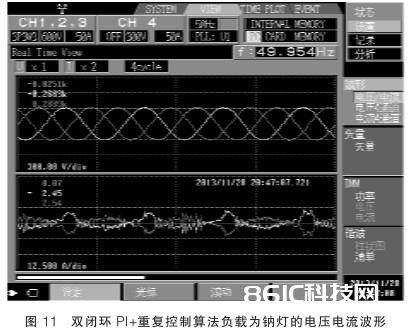
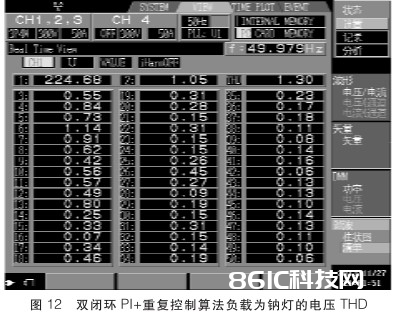
如图11 为在双闭环PI 基础上加上重复操控带钠灯的电压电流波形,如图12 为在双闭环PI基础上加上重复操控的电压THD。由图11、图12 可得定论:使用双闭环PI操控+重复操控带钠灯, 电压的THD比单纯用双闭环PI操控要小得多,为1.30%,并且负载电流畸变比较小。
5.2 钠灯试验成果
选用双闭环PI操控算法完成的三相逆变器,带钠灯时会不停地闪,钠灯不能安稳作业,当加上重复操控后,钠灯不会闪耀,可以安稳地作业。
责任编辑:gt






