


一、uboot存储办法:
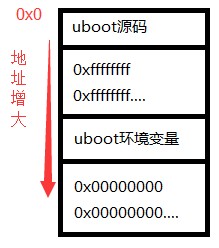
uboot源码:二进制的uboot程序
0xffffffff:uboot分区没有用的闲暇空间
uboot环境变量:bootdelay、bootcmd、bootargs等参数,键与值用0x3d,即“=”离隔,两参数之间用0x00,即\0离隔
0x00000000:uboot参数分区没有用的闲暇空间
二、uboot参数操作:
2.1 参数:
include/configs/xxx.h //xxx为芯片称号
中界说了一些环境变量默认值的宏界说
common/env_embedded.c
中界说了环境变量键值对字符串结构体
2.2 功用函数:
common/env_common.c

初始化如下结构:
#ifdef CONFIG_ENV_IS_IN_NAND
extern int nand_env_init(void);
extern unsigned char nand_env_get_char_spec(int);
extern int nand_saveenv(void);
extern void nand_env_relocate_spec(void);
static struct env_common_func_t nand_env_cmn_func = {
.env_init = nand_env_init,
.env_get_char_spec = nand_env_get_char_spec,
.saveenv = nand_saveenv,
.env_relocate_spec = nand_env_relocate_spec,
.env_name_spec = “NAND”,
};
#else
staTIc struct env_common_func_t nand_env_cmn_func = {0};
#endif
#ifdef CONFIG_ENV_IS_IN_SPI_FLASH
extern int sf_env_init(void);
extern unsigned char sf_env_get_char_spec(int);
extern int sf_saveenv(void);
extern void sf_env_relocate_spec(void);
staTIc struct env_common_func_t nand_env_cmn_func = {
.env_init = sf_env_init,
.env_get_char_spec = sf_env_get_char_spec,
.saveenv = sf_saveenv,
.env_relocate_spec = sf_env_relocate_spec,
.env_name_spec = “SPI FLASH”,
};
#else
staTIc struct env_common_func_t sf_env_cmn_func = {0};
#endif
#ifdef CONFIG_ENV_IS_IN_EMMC
extern int emmc_env_init(void);
extern unsigned char emmc_env_get_char_spec(int);
extern int emmc_saveenv(void);
extern void emmc_env_relocate_spec(void);
staTIc struct env_common_func_t emmc_env_cmn_func = {
.env_init = emmc_env_init,
.env_get_char_spec = emmc_env_get_char_spec,
.saveenv = emmc_saveenv,
.env_relocate_spec = emmc_env_relocate_spec,
.env_name_spec = “NAND”,
};
#else
static struct env_common_func_t emmc_env_cmn_func = {0};
#endif
int env_init(void)
{
switch (get_boot_media())
{
default:
env_cmn_func = NULL;
break;
case BOOT_MEDIA_NAND:
env_cmn_func = &nand_env_cmn_func;
break;
case BOOT_MEDIA_SPIFLASH:
env_cmn_func = &sf_env_cmn_func;
break;
case BOOT_MEDIA_EMMC:
env_cmn_func = &emmc_env_cmn_func;
break;
case BOOT_MEDIA_DDR:
env_cmn_func = &sf_env_cmn_func;
break;
}
if (env_cmn_func && !env_cmn_func->env_name_spec)
env_cmn_func = NULL;
if (!env_cmn_func)
return -1;
env_cmn_func->env_init();
env_name_spec = env_cmn_func->env_name_spec;
return 0;
}
2.3 功用函数调用
common/cmd_nvedit.c
U_BOOT_CMD(
saveenv, 1, 0, do_saveenv,
“save environment variables to persistent storage”,
“”
);
int do_saveenv (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[])
{
extern char * env_name_spec;
env_crc_update ();
return (saveenv() ? 1 : 0);
}
三、内核对参办法:
3.1 mtd办法
文件方式,待补
3.2 ioremap
驱动+使用,待补
3.3 mtd_debug
软件移植,待补
3.4 fw_printenv
3.4.1 东西生成办法:
uboot_source_tree # make ARCH=arm CROSS_COMPILE=arm-linux-gcc env
uboot_source_tree/tools/env下得到fw_printenv与fw_env.config
3.4.2 将东西与配置文件放到板子文件体系上
3.4.3 修正fw_env.config
Device offset 对应于uboot源码目录中include/configs/board_name.h的CONFIG_ENV_OFFSET
Env size 对应于uboot源码目录中include/configs/board_name.h的CONFIG_ENV_SIZE
Flash sector size 对应于uboot源码目录中include/configs/board_name.h的CONFIG_ENV_SECT_SIZE
Number of sectors对应于多少块 这儿用的是nand flash,假如用nor就不必写这个了
3.4.4 使用办法:
ln -s fw_printenv fw_setenv
读:
fw_printenv 读全参
fw_printenv -n param_name 读指定参
写:
fw_setenv param_name param_value 写指定参
3.4.5 过错处理办法:
过错A:/include/linux/types.h:154:36: error: conflicting types for ‘uintmax_t’ typedef u_int32_t uintmax_t;
arm-linux/target/usr/include/stdint.h:140:32: note: previous declaration of ‘uintmax_t’ was here
typedef unsigned long long int uintmax_t;
处理A:两个文件的uintmax_t类型抵触了,将uboot中的类型依照编译器文件中的类型改过来
过错B:include/linux/types.h:155:36: error: conflicting types for ‘intmax_t’ typedef int32_t intmax_t;
arm-linux/target/usr/include/stdint.h:138:24: note: previous declaration of ‘intmax_t’ was here
typedef long long int intmax_t;
处理B:办法同上
过错C:Warning: Bad CRC, using default environment
处理C:计划一、环境变量没save,uboot的环境变量涣散于代码中,只要save才会存储与env地址中,假如不存到env地址中,fw_printenv是找不到的
计划二、fw_env.config没设置参数,参数设置办法见3.4.3
四、uboot增加环境变量
4.1 办法一、uboot命令行手动set param_name param_value
4.2 办法二、uboot代码中增加:
1)uboot源码目录中include/configs/board_name.h增加变量宏界说
2)uboot源码目录中common/env_common.c增加







