0 导言
现在的电动轮椅规划大体可分为两种:一种是选用前被动轮加后轮驱动的办法,因为是前被动轮加后驱动轮的办法,所以回转半径窄的当地不能运用;另一种是依据期望前后左右都能够自在移动的全方向移动办法,该办法是将驱动轮配在车体中心邻近的区域,这样能够习惯必定窄的环境,但因为车轮和车体之间不能发生相对运动,所以不管在驱动轮的装备上怎么下功夫都不能使回转半径为零[1]。
针对上述两种轮椅操控计划的缺陷,规划完结了一种全方向轮椅操控体系。它是以DSP作为操控中心的电动轮椅操控体系,选用单路电动轮PID操控,双路电动轮速度差和谐操控计划。给出了主电路结构,经过实践电路完结了规划计划,最终经过实验成果证明了该规划计划的可行性。
1 体系总体规划
图1 所示为电动轮椅操控体系的结构框图。
首要选用单个DSP 带两路无刷直流电机,直接经过DSP 完结对两路电机的操控,而且将两路BLDCM当时的方位反应信号发送给DSP,DSP 核算采样所得的反应信号和方位给定信号,并宣布相应的PWM 波,操控三相逆变器,然后操控电机动作。
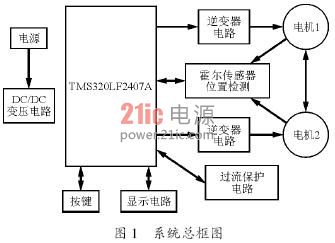
在体系中两路BLDCM 关于DSP来说是一个会集的全体,DSP 获取数据并反应数据。在体系中,两路BLDCM信息的处理有时是彼此独立的,所以具有相对独立的软件和硬件体系。别的,各通道的操控功用及作用简直共同,所以能够交换而不影响操控功用。
键盘和显现部件都是直接与DSP相连,不存在传输过程中的信号搅扰问题,一起关于体系所在的各阶段都能够直接经过键盘操控,而且在显现部件上直观反映。
电机的霍尔传感器将电机转子方位以三路凹凸电平信号送入DSP 的捕获单元(CAP),之后与换相表相比较,以操控三相逆变器功率管的注册、关断,使之与转子的方位相匹配。
此外,体系将所采样的相电压信号作为功率维护信号经电平转化后直接送入DSP的功率维护引脚,当呈现低电平时,将触发DSP的功率维护中止,DSP将封闭对应通路的PWM 波。
DSP宣布的PWM 波经光耦阻隔后送入功率驱动芯片,进行功率放大后送入三相逆变器功率管的栅、源极之间,以操控功率管的开关动作。
2 体系操控战略
本规划首要操控战略包括以下两个方面。
2.1 单路电机操控战略
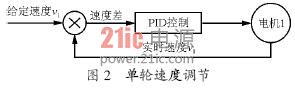
如图2所示,单路电机选用PID 闭环操控对转速进行调理。体系方位闭环功用直接决议了伺服体系的动、静态功用,是体系操控的要害部分。
PID算法具有结构简略,调试便利等特色。虽然在调理时改变量必定,但因为闭环发生的频率很高,所以将改变量设定为一个较小量时,也能满意体系的功用要求。在设定Ki,Kp,Kd 这3个参数规模的基础上,经过对实践电路参数进行微调,在根本满意体系快速性的基础上一起到达较好的超调量,然后进步体系稳定性。
2.2 双路电机操控战略
如图3所示,是规划含有两路独立驱动的电动轮的操控体系框图。因为两个电机是别离安装在两个驱动轮的轴上,所以当两轮的驱动设备内部参数及外界路况不等时,即便两个电机的输入相同,也不能确保两个驱动轮的速度相同,这儿选用补偿体系,来消除体系在运转过程中发生的两电动轮之间的速度差。
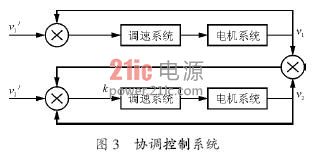
在直线运转中,选用速度差和谐体系来调理两个电动轮的转速。设定一主动轮,让从动轮速度跟从主动轮,使两个电动轮速度尽量共同。在转弯时,内外侧的电机一起减速,内侧电机的减幅远大于外侧电机的减速起伏。两电机别离选用自己的参阅速度,进行独立的PID运算,然后确保在路面情况不是很好的情况下完结轮椅的转弯[2]。
3 体系硬件规划
依据电动轮椅功用需求,该规划首要由一片DSP和两路BLDCM驱动电路,以及必要的电平转化电路组成。DSP担任整个体系的规划和操控,一切的信号的收集和处理都由DSP完结,而且还发生所需的PWM 信号与毛病维护中止请求。结合实践情况,规划中选用TMS320LF2407A 作为操控中心。它包括两个独立的事情管理器:每一个都包括两个16位通用定时器,8个16位脉宽调制(PWM)输出通道,三个捕捉单元,DSP主频为 40MHz[3]。
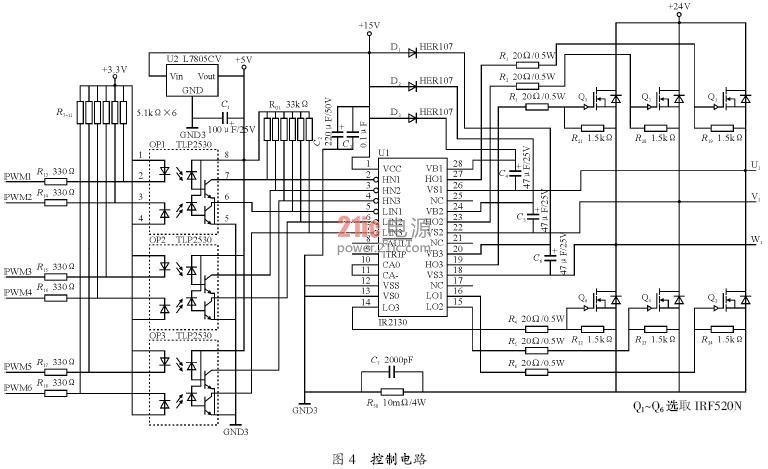
如图4 所示,驱动电路首要经过驱动芯片IR2130作为中心驱动。逆变器主体由6 个功率开关器材组成三相全控桥电路,经过这6 个开关的关断和导通完结BLDCM的驱动,完结对电机转速和转向的操控。为避免自举电容两头电压放电,二极管应挑选高频康复二极管HER107。另一方面为避免自举电容放电形成其两头电压低于欠压维护动作的门槛电压值,电容的取值应充沛的大,本规划挑选47 滋F电容,耐压25 V[4]。
4 体系软件规划
图5所示为发生逆变器驱动信号PWM 波的中止子程序流程图。图6所示为两路BLDCM 速度和谐操控中止子程序流程图。两路BLDCM 别离选用T2和T4 作为时基,然后精确捕获两次中止的时刻距离,两个时钟都选用接连增计数形式。