


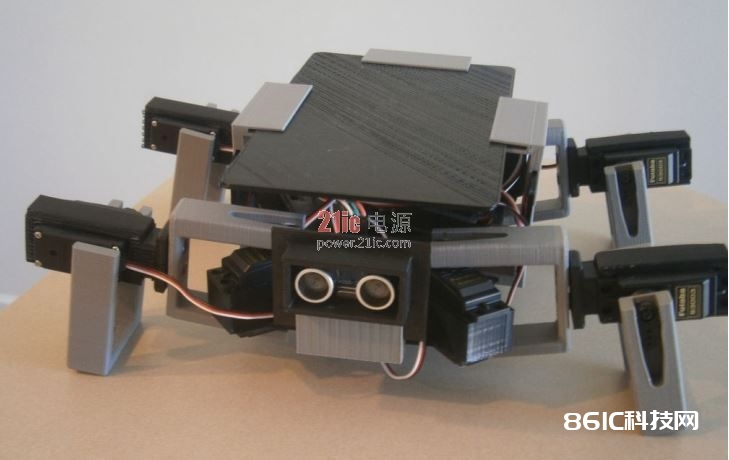
在本项目中,我将从头开端打造一个能够运用蓝牙进行操控的四足乌龟机器人。该机器人具有两个自由度,选用的是匍匐的方法进行运动,所以在不平坦的地上或许不能正常作业。
第一步:3D打印组件
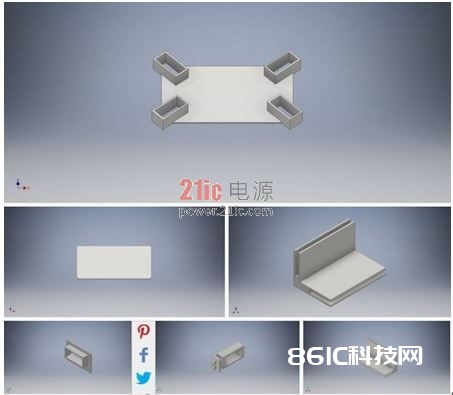
本机器人的部分机身是选用的3D打印技能制造的,我在这里供给了这些3D打印部件的.stl文件和.ipt文件,你能够依据自己的需求对这些文件修正。你需求打印的文件包括一个基板、一个盖板、3个前后接头、一个前面板、4个腿部接口、4个腿部折叠构件、一个后面板、4个旁边面和基板接头、2个旁边面板、4个上部构件。
第二步:其它组件及本钱
下面我列出了本项目所需求的首要部件以及本钱。(当然,在我国购买的话,大部分都会廉价一点。)
·3D打印部件~ 40-60美元
·Arduino Uno~ 20美元
·Arduino 5V传感器 扩展板~ 11美元
扩展板~ 11美元
·HC-06蓝牙模组~ 10美元
·8个Futaba S3003规范舵机~ 80美元
·超声波传感器~ 7美元
·4枚AA电池(驱动舵机)~ 6美元
·AA电池套~ 5美元
·9V电池(驱动Arduino)~ 8美元
·9V电池衔接器~ 5美元
·4个母口对母口线(衔接传感器和扩展板)~ 5美元
·计算机
一共大约在197美元~217美元之间。
第三步:腿的拼装

质料备齐了之后就能够开端拼装了,咱们从腿部开端。8个舵机分红2组,每组4个分别安装在机器人的“大腿关节”和“膝盖关节”处。

其间“大腿关节”处4个的舵机需求固定在机器人的基板上。






