


在不需求接连观测的运用中,均匀功耗与噪声的联系变得更有意义。或许令人难以置信,但噪声和功耗的联系乃至或许变成互补式。这对工程师来说无疑是个好消息。由于在之前的规划中,工程师或许因难以确定该让功耗仍是功用主导其规划而延误了机遇。而现在,无需等候其他人在这一权衡中做出决议,智能传感器架构师可自行对权衡范围内的相关选项进行量化;这一做法将从头界说架构师的作业。
组成智能传感器架构的5个部分,你都造吗?图1是智能传感器架构的一般比如,其间包含了最常见的功用。
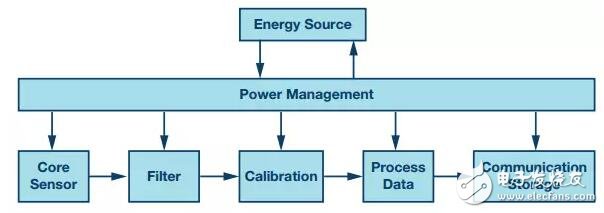
中心传感器
智能传感器节点中的信号链从中心传感器功用开端。最根本方式的中心传感器也称为变换器,其将物理条件或特点转化成代表性的电信号。传感器的份额因子描绘其电呼应与其监控的物理特点或条件的线性联系。
滤波器
滤波器的效果是下降中心传感器或许支撑,但与运用无关的频段中的噪声。在振荡监控运用中,这或许是一个带通滤波器,它将随机振荡与或许指示机器寿数减损的特定频谱特征别离开来。在歪斜传感器中,这或许是一个简略的低通滤波器,例如移动均匀滤波器。这种情况下,时长是树立时刻与滤波器输出剩余噪声之间的一个重要权衡要素。图2显现了ADXL355艾伦方差曲线的比如,它表明相关于发生丈量的均值时刻,丈量的不确定性(噪声)。
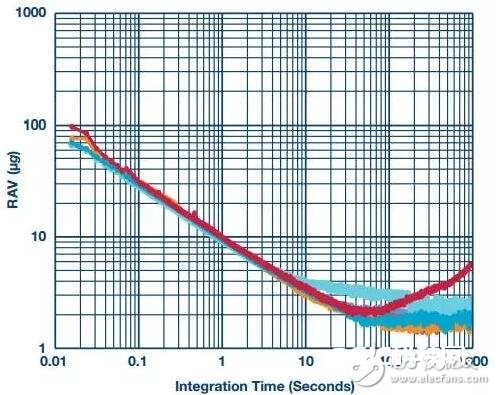
图2. 艾伦方差曲线:ADXL355和ADXL362
校准
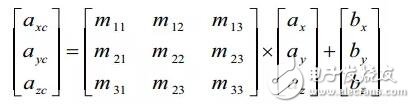
校准功用的效果是经过运用校对公式来进步丈量精度。在要求极高的运用中,通常是在严厉受控条件下进行丈量,经过直接观测传感器呼应来取得此类校对公式。例如在歪斜传感器运用中,校准进程涉及到观测MEMS加速度计在多个不同方向上相关于重力的输出。这种观测的一般方针是观测传感器对足够多取向的呼应,然后求解如下联系式(拜见方程1)中一切12个校对系数(m11、m12、m13、m21、m22、m23、m31、m32、m33、bx、by、bz):
数据处理
数据处理功用用于将校准且滤波的传感器数据转化成恰当的丈量成果以对运用供给最佳支撑。在振荡监控体系中,这或许是简略的RMS-DC转化或带频谱报警的快速傅里叶变换(FFT)。在歪斜检测运用中,智能传感器会运用如下将传感器对重力的加速度呼应转化成方位角估量值。
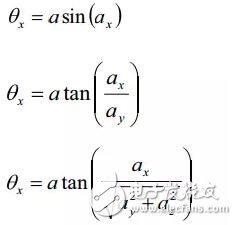
这三个联系式别离代表运用一个、两个和三个加速度计丈量成果的歪斜估量,假定各加速度计彻底正交。
通讯/存储
通讯/存储功用支撑一切物联网云服务的数据分级和衔接(加密/安全、存储和剖析)。
周期供电操作,你有必要知道的那点事儿电源办理(PM)功用对典型智能传感器有三个效果——
1)办理信号链中一切器材的上电时序要求。
2)将电源供给转化成恰当的电压来支撑信号链中一切器材的最优运转。
3)在以必定时刻距离进行丈量的体系中,供给排程信号来触发每次丈量事情。
周期供电是辨认智能传感器节点中此类断续操作的常见办法。在两次丈量事情之间,智能传感器处于低功耗(或零功耗)状况,这种技能有助于节能。图3显现了一个选用此技能的智能传感器在一个完好丈量周期上的瞬时功耗。
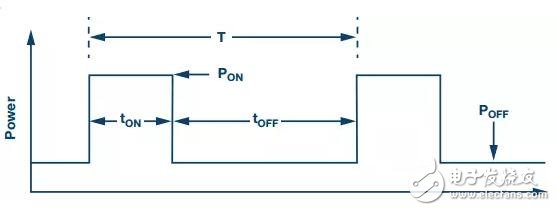
图3:根本供电周期图
下方程供给了一个运用图3所示运转特性来预算均匀功耗(PAV)的简略联系式。
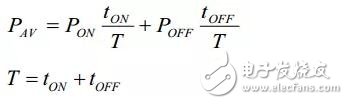
PON是智能传感器节点履行采样并处理数据以发生和传输相关丈量成果的均匀功耗。
POFF是智能传感器节点支撑低功耗睡觉形式所需的均匀功耗。
tON是智能传感器敞开、发生丈量成果、将该成果传输到物联网云、然后封闭所需的时刻。
tOFF是智能传感器处于停止状况(睡觉形式或彻底关断)的时刻。
T为均匀丈量周期时刻。
丈量进程有必要得清清楚楚哒
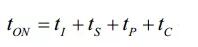
在其敞开时刻(tON )内,智能传感器通常会阅历多个不同运转状况。图4和下方公式显现了一个示例序列,其将敞开时刻分为四段:初始化、树立、处理和通讯。
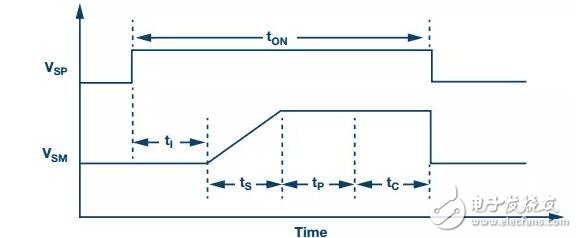
图4:智能传感器丈量周期序列
TI 是初始化时刻,代表从施加电源(VSP)到信号链中的各器材准备好支撑数据采样和处理的时刻。
tS 是树立时刻,代表从第一个数据样本到滤波器输出(VSM)树立于足够高的精度水平的时刻。
tP 是处理时刻,代表从滤波器树立到发生丈量成果所需的时刻。这或许包含运用校准公式、专门的信号处理以及依据物联网安全协议进行数据加密的时刻。
tC 是通讯时刻,代表衔接云服务、发送加密数据以及支撑过失校验或身份验证服务所需的时刻。
怎么下降树立时刻影响,follow me~依据丈量周期的阶段区分(图4),很明显,在滤波器树立时刻这一段中,噪声或许会影响周期供电的智能传感器节点的功耗。一般来说,来自均值操作的噪声起伏的下降量与均值时刻的平方根成份额,而能耗的添加量与均值时刻是直接份额联系。因而,噪声起伏下降10倍会引起能耗(滤波树立期间)添加100倍!这种不成份额的权衡联系很快会对只需最少滤波(最低噪声)的传感器有利。
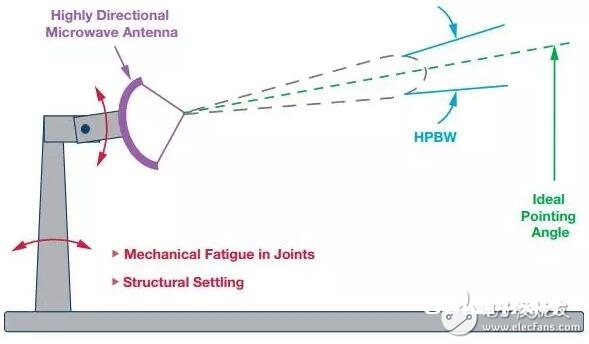
图5:微波天线渠道
考虑图5所示的微波天线渠道,其停靠在一个塔式渠道上。在此类通讯体系中,数据链路的牢靠性取决于指向角的精度。为了保持指向角,或许需求手动调整,特别是地震或其他原因扰动了天线所停靠的渠道之后。此类长途保护的本钱昂扬,并且不及时呼应,因而,作为保护呼应战略的一部分,一家天线运营商正研讨运用MEMS加速度计监控天线方向改变的可行性。
工程师们依据最根本的功用要求开端了此次调研:保持各天线渠道的牢靠通讯。该体系中,牢靠的数据通讯要求天线指向角一直坐落天线的半功率波束宽度(HPBW,拜见图5)以内。因而,他们决议:假如天线在短时刻内的方向改变到达天线HPBW的25%,那么就触发一次实地保护需求。
在支撑此方针的差错预算内,架构师答应歪斜丈量的峰值噪声为丈量方针(HPBW的25%)的10%。为简明起见,架构师还指定噪声峰值等于噪声均方根(rms)值的3倍。方程7反映了一切这些限制条件,并将其简化为一个联系式,即歪斜丈量中的噪声有必要小于HPBW/120。






