


导言
斗极卫星导航体系(BeiDou Navigation Satellite System,BDS)是我国正在施行的自主研制、独立运转的全球卫星导航体系。斗极卫星导航体系致力于向全球用户供给高质量的定位、导航和授时服务,包含向全球免费供给定位、测速和授时服务。现在,斗极卫星体系的建造正按计划稳步推动,现在已成功发射了16颗斗极导航卫星,服务规模掩盖了亚太地区。
无线传感器网络(Wireless Sensor Network,WSN)是由很多的停止或移动的传感器以自安排和多跳的办法构成的无线网络,以协作地感知、收集、处理和传输网络掩盖地舆区域内被感知方针的信息,并终究把这些信息发送给网络的一切者。在无线传感网技能中,最为契合低功耗、低本钱、高可靠性要求的当属ZigBee技能。ZigBee技能是一种作业在全球、美国和欧洲3个频段上的无线通讯技能,依据无线通讯协议。它具有低功耗、低本钱、低杂乱度、主动组网的特色,首要适合于短间隔无线通讯、组网、主动操控和长途操控等范畴,并能够嵌入至各种设备中。
这两种抢手技能特色明显,假如将它们结合,即把定位导航技能与短间隔组网技能结合,就能够完成更广泛和更杂乱的运用,满意关于不同规划和要求的检测、定位、导航等各项需求,便利数据传输,补偿现有技能产品的空白。
1 立异功用
1.1 准确认位
ZigBee节点广泛运用于户外环境勘察、智能交通监控等范畴,单纯的ZigBee节点收集的数据是一维数据,孤立的数据不利于剖析与决议计划。假如将收集地的方位信息也一同获取,就能够把收集到的环境信息与方位信息相结合,在汇总、剖析时绘制成一个二维的数据地图,更将直观地了解信息的散布情况;而假如再加上准确的时刻,就组成了三维的数据体,这样的数据愈加归纳、全面。
1.2 直接定位
卫星定位一般要求在有天空视界的室外,因而在室内就定位困难。运用ZigBee的直接定位,当周围现已存在了包含定位设备的ZigBee网络时,就能够接入ZigBee网络完成直接定位。相当于在这个区域内恣意可接入网络的地址供给了实时刻接定位的服务,任何设备都能够透过ZigBee网络获取自己当时的方位信息,这样不只下降了定位服务的本钱,也扩展了定位的运用规模。
1.3 网络授时
ZigBee网络尽管具有低本钱、低功耗、高可靠性的优势,可是考虑到网络延时和较低的数据传输速率,因而在体系实时性方面不尽善尽美。当ZigBee网络面临的是某种对实时性要求较高的运用时,势必会由于较大的时延,影响数据的准确性。假如选用从斗极卫星导航体系获取的准确时刻,然后对全网一切节点校时,那么节点的同步性就得到了进步,然后进步体系的响应速度。
1.4 数据通讯
斗极卫星导航体系尽管能够供给准确的时刻和方位信息,可是却没有信息的传递才能,ZigBee网络就为这种信息安排供给了一种简洁的办法。经过把斗极定位的数据架设于ZigBee网络之中,就能够让方位信息传递起来。
2 斗极+ZigBoe终端的体系规划
2.1 结构体系
斗极导航体系与ZigBee网络结构体系如图1所示,首要由ZigBee网络节点和斗极导航节点组成。传感网子网内一般由一个主节点和多个节点组成。主节点首要担任ZigBee网络的组网和网内设备的办理,一起与斗极定位导航模块通讯。

2.2 硬件规划
在ZigBee节点的规划上,选用Freescale公司针对ZigBee技能推出的MC13213芯片。该芯片是完好的单芯片解决方案,其内部集成了HCS 08 MCU和遵从IEEE802.15.4规范的第二代无线射频收发器,也称为Modem。MC13213能够以十分低的总资料本钱树立强壮的网络节点。其特色是速度快,片内资源丰富。其硬件框图如图2所示。
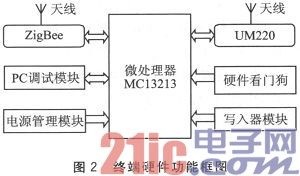
斗极定位导航模块以芯星通公司的UM220芯片为中心规划。UM220是针对车辆监控、气候勘探和电信电力授时等运用而推出的斗极/GPS双体系模块。单芯片支撑斗极BD2/GPS功用,无需外接CPU即可直接输出NMEA数据,支撑UART、SPI、1PPS、I2C等多种接口。引脚衔接如图3所示,本规划经过TXD3、RXD3别离与MC13213的PTE1(TXD1)、PTE0(RXD1)相连,完成数据通讯。

2.3 软件规划
ZigBee是依据IEEE 802.15.4规范的低功耗个域网协议。依据这个协议规则的技能,是一种短间隔、低功耗的无线通讯技能。ZigBee设备包含IEEE 802.15.4(该规范界说了RF射频以及与相邻设备之间的通讯)的PHY和MAC层,以及ZigBee仓库层——网络层(NWK)、运用层和安全服务供给层。
由于受无线传输功耗的约束,传输有用间隔在100 m以内,因而关于在区域规模内的掩盖就需求经过内置的ZigBee协议栈完成主动组网和途径核算功用。在终端规划中,数据传输的承载前言是ZigBee网络,不管是准确认位的坐标信息,仍是直接定位的侦测信息,亦或是时刻同步的数据,都依赖于ZigBee所供给的数据服务进行传输。
准确认位的功用依赖于斗极导航定位所取得的准确坐标。UM220模块供给斗极的定位信息。UM220输出数据选用ASCII码,依照NMEA-0183格局进行异步串行通讯,因而经过将其经过串口与MC13213相连,设定每秒输出一次定位信息,经过MC13213内置的单片机处理定位信息。UM 220输出句子有$BDGGA、$BDGSA、$BDGSV、$BDRMC等。其间$BDGGA定位数据句子是最为常用的句子,因而咱们选用它作为定位信息的输出句子。
$BDGGA句子包含17个字段:句子标识头,国际时刻,纬度,纬度半球,经度,经度半球,定位质量指示,运用卫星数量,水平准确度,海拔高度,高度单位,大地水准面高度,高度单位,差分GPS数据期限,差分参阅基站标号,校验和完毕符号(用回车符
直接定位常用的算法有两种:依据间隔的定位算法、与间隔无关的定位算法。间隔无关的定位算法的长处是,对节点的硬件结构要求较低;缺陷是定位精度不高,难以满意室内定位的精度要求。依据间隔的定位则是经过丈量节点间点到点的间隔或视点信息,再运用必定的核算办法核算节点方位。常用的测距技能有RSSI、TOA、TDOA和AOA等。由于ZigBee无线通讯模块能够直接供给RSSI值,因而本规划运用RSSI信息来完成定位功用。
运用RSSI丈量间隔,需求树立间隔与RSSI的模型。由于经历模型在实践定位前,需求先模仿测验环境,树立该环境中各个间隔上的方位和信号强度联系的离线数据库,操作起来较为繁琐,数据库也不适合单片机的运用,因而这儿选用理论模型,用无线电传达途径损耗模型进行核算。
自由空间无线电传达途径损耗模型公式如下:
Loss=32.44+10klog10d+10klog10f (1)
式中,d为接纳点距信源的间隔,单位为km;f为频率,单位为MHz;k为途径衰减因子。
实践运用环境中,由于存在多径、绕射、障碍物等各种影响冈素,因而还要对模型进行改善。这儿选用一种对数一常态散布模型,其核算公式为:
式中,Xσ是均匀值为0的高斯散布随机变数,取其规范差规模为4~10;k的取值规模为2~5。取d=1,代入式(1)可得Loss,即PL(d0)的值。由此得到不知道节点接纳锚节点信号时的信号强度公式如下:
RSSI=发射功率+天线增益一途径损耗(PL(d))
假定移动节点0接纳到n(n≥3)个固定节点发送的信号,从接纳到的n个信号中选取接纳信号最强的3个固定节点作为信标节点A、B、C。运用RSSI测距办法,丈量到的间隔别离为dA、dB、dC,此刻就能够依据dA、dB、dC选用图4所示的三边丈量法确认方位。假如不相交于一点,则能够依据质心法来完成。
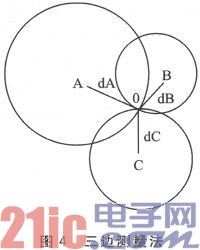
理论上,尽管获取3个已定位节点的信息就能够确认一个不知道节点的方位,可是实践情况会由于搅扰而呈现差错。例如,当两个射频之间呈现意外遮挡物时,接纳信号会下降30 dBm。为了批改反常,进步定位成果的准确性,直接定位需求尽可能多的已定位节点的RSSI值,进行相关的定位核算,那么当选用很多的节点后,RSSI的值将趋于安稳,这时就能够得出愈加准确的定位成果。
ZigBee全网的时刻同步运用FTSP算法完成。它经过发送一条报文并在发送和接纳两头别离打下时刻戳来完成1对1或许一对多的时刻同步。FTSP算法供给多跳的时刻同步,由网络的根节点保护一个大局时钟,其他的一切节点都同步到根节点,由此将全网中的一切节点时刻同步。
FTSP算法的完成过程如下:
①发射同步(sync)字节,核算时刻戳t,核算办法为当时的时刻减去音讯数据部分的发射时刻,音讯数据部分的发射时刻,能够经过数据长度和发射速率得出。发射时刻戳t。
②接纳数据包,记载sync字节最终抵达的时刻tr,核算位偏移(bit offset)。在收到完好音讯后,核算位偏移发生的时刻延迟tb,核算办法为核算位偏移和接纳速率。
③接纳节点核算与发送节点之间的时钟偏移量off-set,然后调理本地时钟与发送节点的时钟同步。
3 功用测验
3.1 定位差错测验
直接定位的实践测验中,共布置了23个传感节点,其间运用斗极直接定位的有11个,没有供给斗极定位而运用ZigBee定位的有12个。节点随机散布,节点间设置了10~20 m不等的间隔,然后进行了10次直接定位的试验。经过统计数据,剖析与实践丈量值的差错,成果如图5所示。
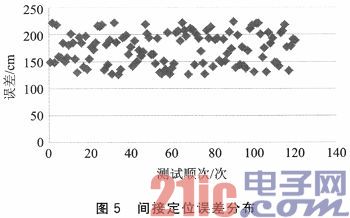
归纳核算,10次试验的均匀定位差错为1.7 m。考虑到均匀14 m的节点间间隔,定位差错较小,契合运用要求。
3.2 时刻同步差错测验
在时刻同步的仿真中,仍然选用直接定位测验中的节点。23个节点方位随机散布,时刻同步周期为5 s,在原有ZigBee协议中增加了部分模块的功用,包含MAC层的时刻戳。在试验中,别离记载了FTSP在网络中节点间单跳和多跳的均匀同步差错,测验次数为10次,试验成果如
图6所示。
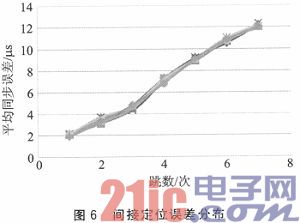
依据试验成果,两个节点单跳FTSP均匀差错为2.12μs;可是到7跳的时分,两个节点的均匀差错,FTSP为11.97 μs,成果表明,FTSP算法在多跳网络中的同步差错精度较高,曲线滑润,契合要求,能够到达提高ZigBee网络时刻同步准确性的意图。
结语
运用Freescale的ZigBee通讯模块MC13213与和芯星通UM220定位导航芯片组合建立的硬件和软件渠道,把斗极卫星定位体系的定位信息和授时功用与ZigBee体系相结合;运用准确的定位和授时数据改善ZigBee协议栈的功用,增强其节点的功用,完成了准确认位、直接定位和全网时刻同步的改善。经过ZigBee网络传输功用的优势,补偿了单一斗极导航数据缺少流动性和数据形状孤立的缺乏。经测验,规划终端功用安稳,作用杰出,到达了预期的规划方针。






