


1 导言
核算机串行通讯是核算机与操控设备(plc)进行数据传送的根本通讯办法,也是完结工业自动操控常常用到的通讯形式。每一种通讯办法都严厉约好了与其对应的通讯协议,要保证核算机与plc之间能正常通讯,就有必要遵循其通讯协议编写通讯程序。
2 串行通讯
串行通讯在工业体系操控的领域中一向占有着极其重要的位置,串行端口(rs-232)是核算机上的规范装备,常用于衔接调制解调器来传输数据,在核算机的硬件设备管理器中能够看到,界说为com1、com2等。常用的串行通讯办法有两种,分别是rs-232和rs-485,本文以rs-232办法为例进行介绍。
3 上位机编程
3.1 c++builder编程
c++builder是由borland公司推出的产品。它选用c++言语作为开发言语,是面向对象言语,具有可视化编程界面且功用强大。
3.2 c++builder串行通讯相关api函数
c++builder自身并不供给独自的串行通讯组件,而是运用一些windows api的函数来达到此意图。这些函数是由操作体系所供给,能够为程序规划人员供给相当多的履行功用。api中与串行通讯相关的函数约有20个,本文将对常常运用的函数作评论。
(1) 翻开串行端口
hcomm=createfile(comno,generic_read|generic_write,0,null,open_existing,0,0)
函数参数界说如下:
hcomm:createfile()函数的回来值,程序运用此回来值进行相关的串行端口操作。
comno:界说串行端口号,为com1、com2等。
generic_read|generic_write:对串行端口的读/写操作。
0:是否同享串行端口,一般不会将串行端口与其它程序同享,因而设为0,否则为1。
null:函数的回来值hcomm是否可被子程序承继,此处设为不行承继。
open_existing:翻开端口的办法,串行端口是一种设备,有必要指定为open_existing办法。
0:运用同步或异步办法传输数据,同步办法编程简略,速率快,因而设为0,否则为1。
0:因为运用串行端口编程,设为0。
(2) 得到串行端口状况:
getcommstate(hcomm,dcb)
函数参数界说如下:
hcomm:createfile()函数的回来值。
dcb:串行端口操控块地址,担任对串行端口参数进行设置,详细参数如下:
dcb.baudrate:设置串行端口的波特率,有19200kb/s、9600kb/s、4800kb/s几种,一般为:9600kb/s。
dcb.bytesize:设置串行端口的数据位数,有5、6、7、8几种,欧姆龙plc数据位数为7。
dcb.parity:设置串行端口的校验位查看,有none、even、odd几种,设为none。
dcb.stopbits:设置串行端口的中止位数,有1、1.5、2几种, 欧姆龙plc的中止位数为1。
(3) 设置串行端口状况:
setcommstate (hcomm,dcb)
函数参数界说与getcommstate()函数相同。
(4) 向串行端口写数据:
writefile(hcomm,senddata,bs,lrc,null)
函数参数界说如下:
hcomm:createfile()函数的回来值。
senddata:写数据的地址。
bs:写入数据的字节数。
lrc:被写入的数据地址。
null:写入数据的同步查看,串行端口选用同步通讯时能够设为null。
(5) 铲除串行端口的过错或将串行端口当时的数据状况送至输入缓冲区:
clearcommerror(hcomm,dwerror,cs)
函数参数界说如下:
hcomm:createfile()函数的回来值。
dwerror:回来过错信息代码。
cs:指向串行端口状况的结构变量。
(6) 从串行端口的输入缓冲区读出数据:
readfile(hcomm,inbuff,cs.cbinque,nbytesread,null);函数参数界说如下:
hcomm:createfile()函数的回来值。
inbuff:指向用来存储数据的地址。
cs.cbinque:读取数据的字节数。
nbytesread:总的读取字节数。
null:假如不进行后台作业,串行端口设为null。
(7) 封闭串行端口:
closehandle(hcomm)
函数参数界说如下:
hcomm:createfile()函数的回来值。
4 plc通讯数据帧介绍
核算机与欧姆龙plc通讯时,按应对办法进行。由核算机发给plc一组ascii码字符数据,这一组数据成为指令块。plc收到指令块后经剖析以为指令正常,则依照指令进行操作,将操作成果回来给核算机。plc回来给核算机的这一组数据称为呼应块。若plc收到指令后经剖析承认指令不正常,则回来给核算机过错指令块。核算机和plc通讯时,欧姆龙plc是被迫的,有必要先由核算机给plc宣布指令块,plc再给核算机宣布呼应块。指令块和呼应块以帧(frame)为单位进行传送,一帧最多由131个字符组成。下面将欧姆龙plc指令帧与呼应帧的组成结构介绍如下:
4.1 指令帧
指令帧组成结构如图1所示。

帧结构解析:
@:在开始处有必要放置
节点号:有效值为00—31, 表明pc机最多可同32台plc通讯
头代码:plc的指令代码
发送文本:pc机发送的指令参数
fcs(frame check sequence) :帧查看次序代码(帧校验码)
帧校验码是2位(bit) 十六进制数。它是由帧数据包括的一切字符的ascii码进行位异或运算的成果。
终止符:“*”号和回车符“cr”
举例如下:
读h区指令帧结构如图2所示。

4.2 呼应帧
呼应帧结构如图3所示。
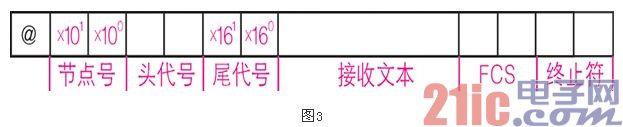
帧结构解析:
@ :回来指令头
节点号 :有效值为00—31,回来数据的plc节点号
头代码 :plc的指令代码
尾代码 : 回来指令完结状况码
接纳文本: 在有数据时回来的数据
fcs :帧查看次序代码
终止符:“*”号和回车符“cr”
举例如下:
读h区呼应帧结构图4所示。

4.3 fcs(帧数据冗余校验码)的核算
为了下降串行通讯的误码率,在接纳和发送端都有必要对数据进行校验,常用的办法是进行fcs校验。对帧数据进行冗余校验核算时,应对帧数据中各个字符的ascii码进行位异或运算,然后将成果转为2位十六进制字符。
5 c++builder api函数运用
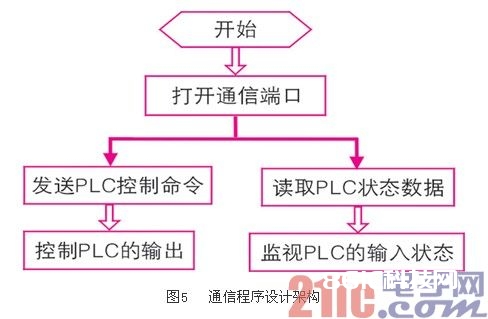
5.1 通讯主程序的规划架构
通讯主程序的主要功用:完结核算机对plc的运转操控和状况监督,即构成一个闭环监控体系,程序规划架构如图5所示。
5.2 翻开串信端口
(1) 翻开通讯端口,对端口进行初始化设置,作业流程如图6示。
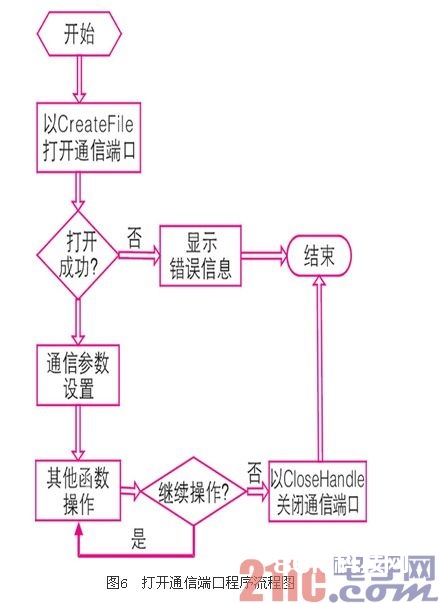
(2) 翻开通讯端口程序源代码:
void__fastcall tform1::button1click(tobject *sender)
{
char *comno;
dcb dcb;
string temp;
temp=“com”+inttostr(rdcom-》itemindex+1);
comno=temp.c_str() ;
hcomm=createfile(comno,generic_read|generic_write,
0,null,open_existing,1,0);
if(hcomm==invalid_handle_value)
{
messagebox(0,“翻开通讯端口过错,请查看端口是否被占用!!” ,“comm error”,mb_ok);
return;
}
getcommstate(hcomm,dcb);
dcb.baudrate=cbr_9600;
dcb.bytesize =7;
dcb.parity =evenparity;
dcb.stopbits =onestopbit;
setcommstate(hcomm,dcb);
if(!setcommstate(hcomm,dcb))
{
messagebox(0,“通讯端口设置过错!!!”,“set error”,mb_ok);
closehandle(hcomm);
return;
}
}
5.3 写plc内存数据
(1) 将核算机宣布的指令写入plc,完结核算机对plc的操控功用。作业流程如图7示。
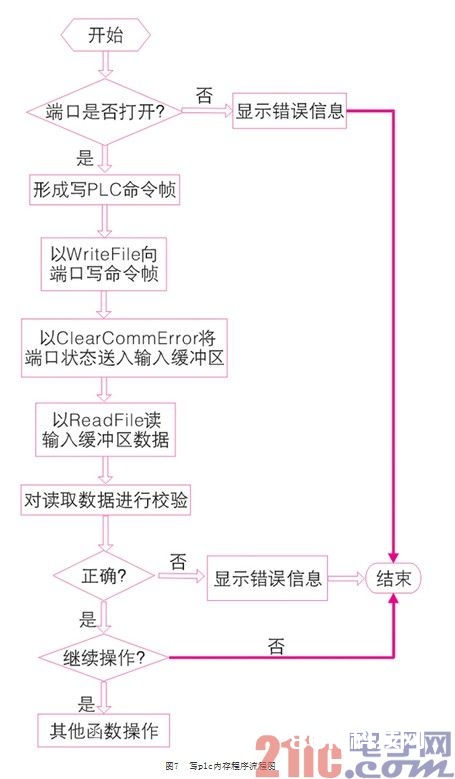
(2) 写plc内存函数程序源代码:
string tform1::write(string address,string value)
{
unsigned long lrc,bs;
string temp;
char *senddata;
char inbuff[1024];
int ln,i=0;
string word,check;
dword nbytesread,dwevent,dwerror;
comstat cs;
word=“@00wd”+address+value;
if(hcomm==0)
{
messagebox(0,“串口未翻开!!!”,“过错信息”,mb_ok);
return(0);
}
temp=outchecksum(word);
senddata=temp.c_str() ;
bs=strlen(senddata);
loop:
if(++i《=3)
{
writefile(hcomm,senddata,bs,lrc,null);
sleep(100);
if(hcomm==invalid_handle_value) return(0);
clearcommerror(hcomm,dwerror,cs);
if(cs.cbinque》sizeof(inbuff))
{
purgecomm(hcomm,purge_rxclear);
return(0);
}
readfile(hcomm,inbuff,15,nbytesread,null);
check=inbuff;
if(check.substring(6,2)!=“00”)
{
goto loop;
}
}
else
{
messagebox(0,“数据写过错”,“通讯过错”,mb_ok);
}
}
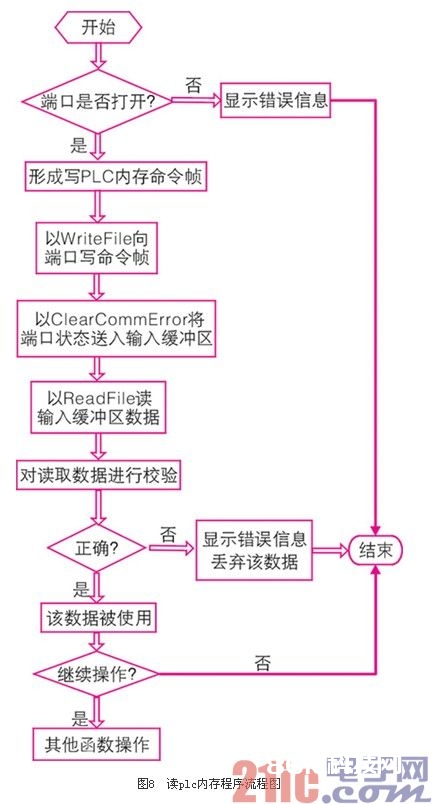
5.4 读plc内存数据
(1)从plc中读取数据,监督plc的运转数据,作业流程如图8示。
(2) 读plc内存函数程序源代码:
string tform1::read(string address,string value)
{
string readdata,readdata1,readdata2;
string temp;
unsigned long lrc,bs;
char *senddata;
int ln,i=0,len;
dword nbytesread,dwevent,dwerror;
comstat cs;
char inbuff[1024];
string word;
word=“@00rd”+address+value;
if(hcomm==0) return(0);
temp=outchecksum(word);
senddata=temp.c_str();
bs=temp.length();
loop:
if(++i《=3)
{
writefile(hcomm,senddata,bs,lrc,null);
sleep(100);
if(hcomm==invalid_handle_value) return(0);
clearcommerror(hcomm,dwerror,cs);
if(cs.cbinque》sizeof(inbuff))
{
purgecomm(hcomm,purge_rxclear);
return(0);
}
cs.cbinque=4*strtoint(value)+11;
readfile(hcomm,inbuff,cs.cbinque,nbytesread,null);
inbuff[cs.cbinque]=`\0`;
readdata =inbuff;
len=readdata.length();
if(len==0)
{
goto loop;
}
if(readdata.substring(6,2)!=“00”)
{
goto loop;
}
if(inchecksum(readdata)!=1)
{
goto loop;
}
}
else
{
messagebox(0,“读数据过错”,“通讯过错”,mb_ok);
}
return(readdata);
}
6 结束语
本文环绕怎么运用c++builder
api函数编写出契合核算机与欧姆龙plc串行通讯协议的操控程序进行论述,项目现已调试经过运转。






