


1、导言
轿车悬架体系阻尼特性的合理匹配对进步乘坐舒适性和操作安稳性起着至关重要的效果。现在,国外轿车制造商遍及选用替换不同阻尼特性的一系列阻尼器或许机械式可调阻尼器,片面与客观点评相结合的办法进行悬架阻尼参数的试验匹配[1~2],国内轿车企业需求国外技能支持。但该匹配法只能完结紧缩阻尼与恢复阻尼联动调理(或阻尼离散调理),很难完结悬架阻尼参数的最优与主动匹配,因而,研讨具有自主知识产权和立异特征的主动匹配办法,对进步我国轿车悬架的开发才能具有重要的现实意义。
阻尼可调的磁流变阻尼器具有传统的被迫液力阻尼器无与伦比的长处[3],使用它来替代人工调理机械式可调阻尼器研讨轿车悬架阻尼参数的最优与主动匹配是一种较抱负的挑选。轿车悬架阻尼参数主动匹配的理论办法与要害完结技能触及一系列问题需求处理,研发成功用辨识轿车阻尼器运转状况(恢复与紧缩工况)的可控状况灵敏电流源是要害技能之一,关于特定的轿车磁流变阻尼器,针对给定的鼓励条件,经过调理励磁电流完结阻尼器紧缩与恢复阻尼参数的独立调理,使轿车的操作安稳性和乘坐舒适性到达最优,获取阻尼器在该鼓励下的阻尼特性,为成功开宣布轿车悬架阻尼参数主动匹配设备奠定坚实的技能根底。
2、体系组成及软硬件规划
2.1 体系作业原理及组成
体系的作业原理是:在某一时刻,经过对固定于阻尼器活塞杆和作业腔上的传感器来的数据进行剖析,判别出阻尼器与上一时刻比较是处于拉伸或是紧缩状况,依据不同的状况,动态改动经过阻尼器励磁线圈的电流,引起内部磁场改动,然后到达改动其阻尼力的意图。
作业时,阻尼器在竖直方向的主振频率约几赫兹,振动起伏最大约几百毫米,要判别其在某一时刻与上一时刻比较是处于拉伸或是紧缩,用超声波来判别是一种较经济的办法[4];但因为超声测距的时延性,要精确测得其渡越时刻较困难,国内外学者在这方面作了很多的尽力[5~7];本课题因为并不需求知道减振器精确的振动位移数据,因而选用了两次测得的时刻值比较的办法来判别减振器的拉伸或紧缩状况。
体系组成如图1所示,超声波部分感知阻尼器的运动状况,数字信号处理器TMS320LF2407A对阻尼器的运动状况进行辨认,然后输出操控信号效果于电流驱动器。
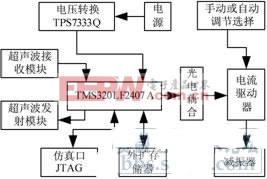
图1 磁流变液阻尼器运转状况灵敏电流源体系组成框图
2.2 体系首要硬件规划
2.2.1 超声波发射模块
超声波发射电路如图2所示,因为丈量间隔小,体系没有选用变压器升压来驱动超声波换能器,直接由操控器守时发生40KHz的超声脉冲信号,驱动开关管3904,为了向发射头供给较大的驱动电流,选用了两个非门并联衔接方式;为了有用的遏止超声波发射头的余振,用一个非门为驱动器的一侧供给180度的相移信号,另一侧由相内信号驱动;供电电压选用5V;电容C2、C3阻断直流通路,将直流电压转换为等幅的交变电压,使发射头能够长时刻牢靠、安稳的作业。
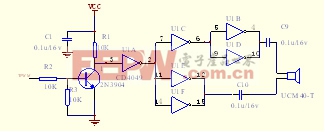
图2 超声波发射电路
2.2.2 超声波接纳模块
超声波接纳模块选用CX20106A芯片,该芯片内部由前置扩大器、限幅扩大器、宽频带滤波、检波、波形整形、滞后比较器等电路构成;1脚为信号输入,2脚是前置扩大器频率特性和增益设定端,3脚接峰值检波电容,5脚电阻设定带通滤波器的中心频率,6脚接积分电容,7脚输出,当检测到信号时输出一低电平,因为要与DSP的电平(高为3.3伏)匹配,选用了R3,R4分压。
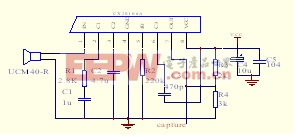
图3 超声波接纳电路
2.2.3 主操控器及外围电路
操控器选用了TI公司的TMS320LF2407A数字信号处理器,片内有高达32K字的Flash程序存储器,使本体系无需外扩程序存储器;运用T1PWM比较输出40KHz的方波驱动超声波换能器,CAPTURE4对接纳到信号引起的中止进行检测,守时器T3对超声波的传达时刻进行计时;为便利调试,体系还扩展了1个64K字的数据存储器IC61LV6416,调试完结后,将程序写入片内Flash,体系即可脱离开发环境独立运转。
电源电路选用LM2596将12V转换为+5V,其输出电流最大为3A,均匀作业效率可达80%以上,然后由TPS7333Q转换为3.3V,供主控芯片TMS320LF2407A及其外围电路运用,能彻底满意体系的供电要求。
JTAG接口,首要用于芯片内部测验以及对体系进行编程、仿真、调试等;TMS320LF2407A内嵌JTAG模块,但对器材编程的功用对一般用户是屏蔽的,因而只需较少的厂家能出产硬件仿真器。本体系选用ICETEK-5100PP硬件仿真器,结合TI公司的开发软件CCS2.20完结程序调试、烧入等作业。
2.2.4 电流驱动器
电流驱动器如图4所示,选用了DC-DC改换中的BUCK改换方式,其间J1接磁流变阻尼器线圈; U1接开关光耦,其2、4脚相接,当操控器判别出磁流变阻尼器的运动状况后,挑选将其与3或许1脚接通,3脚和1脚的操控电压由可调电位器R2、R11操控,表明需求操控输出电流巨细的信号,然后经过电压跟从器输入TL494,该信号与反应信号比较后,操控TL494的输出脉冲宽度,当在一个周期的高电平期间,信号经过Q2驱动后,使MOSFET导通,电源电压加在减振器线圈上;当在一个周期的低电平期间,MOSFET截止,磁流变减振器线圈内部贮存的能量经过二极管D1续流;在一个周期中经过改动凹凸电平的时刻比,使效果于线圈的均匀电压发生改动,然后改动其导通电流;电流值又经过R16采样,然后扩大、滤波后又输入TL494,与操控信号进行比较,使反应值及时盯梢操控信号电压值的改动,构成闭环操控回路,主动调理脉宽,确保输出电流的安稳。 图中R7、R8、C2是相位补偿,C1、R9决议TL494的内部振动频率,R12,R15决议其死区时刻,Q3的效果是为MOSFET的极间电荷供给泄放回路。
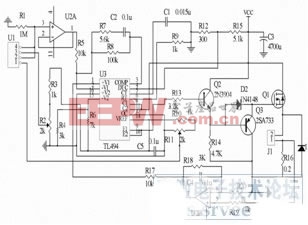
图4 电流驱动器原理图
2.3 软件规划
图5是完结一次测控的流程图:
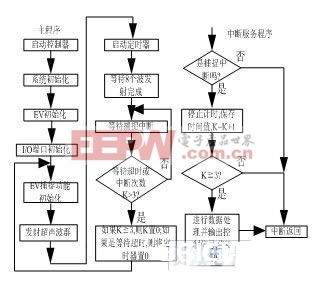
图5 超声波检测运转状况流程图
3、试验测验成果
3.1 丈量的分辨力
在温度T=24.875°C时,测验各间隔对应的计时脉冲数据见表1:
表 1

从表中数据能够看出,实践间隔每1毫米的改动,计数脉冲有约30个的改动,每个记数脉冲为0.1μs。
3.2 体系呼应的实时性
体系每测控一个循环的耗时首要由两部分构成,即超声波对阻尼器的运转状况辩识的时刻和电流驱动器接纳到操控信号至输出电流安稳的时刻,前者因为选用了丈量三次经过必定处理后,作为终究的计数脉冲值,每次丈量最大耗时约2.5ms,共7.5ms;图6是电流驱动器在阶跃上升和下降信号效果下的实测动态呼应图,图中上面是阶跃输入信号曲线,纵向每格的幅值为2.00V;下面是在取样电阻两头实测的呼应曲线,纵向每格的幅值为1.00V;横向为时刻轴,每格的宽度为2.00ms;能够看出,在阶跃信号鼓励下,实践的上升时刻和下降时刻都低于2.5ms,因而体系总的动态呼应时刻约10 ms,彻底满意实时性要求。
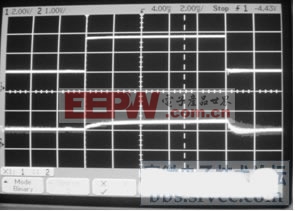
图6 电流驱动器的动态呼应图
3.3 体系的安稳性
体系的安稳首要由取决于超速波传感和电流驱动器部分,前者因为环境要素的影响或许发生误触发,因而在一个测控循环中,经过对接连三次丈量数据结合阻尼器的装置方位和或许运转的最大速度等进行数据有用性剖析,然后确认本次循环的精确时刻,表2是在同一间隔处,静态丈量9次的测验成果:
表 2

因为阻尼器的电感约2.45mH,静态电阻约1.2,电流驱动器选用BUCK改换拓扑电路结构时,后边不接平波电感和滤波%&&&&&%输出的电流纹波现已很小,因而开关管后边的线性部分是典型的一阶惯性环节,经过PI调理后,其单位阶跃呼应没有稳态差错,不存在超调量和峰值时刻,只需反应系数获得适宜体系都是安稳的。
4、定论
本文选用超声波传感器结合数字信号处理器对磁流变液阻尼器运转状况进行感知,使用脉宽调制(PWM)原理结合磁流变液阻尼器的阻抗特性,规划了其电流源驱动器;软、硬件规划简略、便利,又能满意了体系的实时性和分辨率要求,对相似非触摸式动态位移丈量体系也有必定的参考价值。
参考文献
[1] K. J. Kitching, D. J. Cole, and D. Cebon. The development of a heavy vehicle semi-active damper[J]. Proc. Intl.Symposium on Advanced Vehicle Control. AVEC’96, Aachen, German, 1996.
[2] Y. He and J. McPhee. A Design Methodology for Mechatronic Vehicles: Application of Multidisciplinary Optimization, Multibody Dynamics, and Genetic Algorithms[J]. submitted to Vehicle System Dynamics, 2004.
[3] Sung-Ryong Hong, Seung-Bok Choi. Vibration Control of a Structural System Using Magneto-Rheological Fluid Mount[J]. Journal of Intelligent Material Systems and Structures, Vol. 16(111-12), 2005.
[4] B. Cretin,P. Vairac,N. Jachez, ,et al. Sensitive ultrasonic vibrometer for very low frequency applications[J].REVIEW OF SCIENTIF%&&&&&% INSTRUMENTS 78, 085112 _2007.
[5] Hannes EImer, Herbert Schweinzer. High Resolution Ultrasonic Distance Measurement in Air Using Coded Signals[C]. IEEE Instrument and Measurement Technology Conference Anchorage ,AK,USA,21-23 2002.
[6] 赵珂, 向瑛, 王忠.高精确度超声波测距仪的研发[J]. 传感器技能,2003 年第22 卷第2 期55-57。赵海鸣,卜勇敢,王纪婵.一种高精度超声波测距办法的研讨[J].湖南科技大学学报(自然科学版),2006 年9 月第21卷第3期35-38.






