


摘要:本规划是选用单片机作为从机(也称下位机),而PC机作为中心操控机的主从式体系。主机一起依据从从机接纳的进程参数进行判别处理并给从机发送各种操控指令。运用单片机的串行口与PC机的串行口进行串行通讯,PC机可对长途前端单片机进行操控,将单片机收集的数据传送到PC中去,由PC机对数据进行处理和显现,一起把反应信号发到单片机,完成闭环操控和办理。本规划在VC++6.0的环境下,编写运用C++言语,SQL数据库的串口通讯程序,操控由单片机操控的智能小车。
0 导言
跟着多微机体系的运用和微机网络的开展,通讯功用越来越显得重要。在工业操控体系(尤其是多点现场工业操控体系)规划实践中,单片机与PC机组合构成分布式操控体系就是一个重要的运用;主控计算机经过485网络监督办理下位分机的运转状况。在以单片机为根底的数据收集和实时操控体系中,经过计算机中的RS-232接口进行计算机与单片机之间的指令和数据传送,就能够运用计算机对出产现场进行监测和操控。本文规划是以单片机AT89C51为操控中心,附以外围电路,选用反射光耦(1550-01)检测是非线,霍尔传感器(A04E)+磁钢来完成智能车行进的计程,选用四位共阴LED完成行进计程和时刻的替换计数显现。一起还充分运用单片机的串口、并口资源和运算、处理才能,来完成小车的按轨道直线行走、按轨道转弯、计数小车行进的间隔,最终泊车等智能操控体系。避免了当时的电动小汽车基本上只能采纳的是依据纯硬件电路的一种开环操控办法,或者是直线行进,或者是在遥控下做出行进、撤退、转弯、泊车等基本功用。
1 体系的规划思路
本文规划是选用PC机做上位机和单片机(作为智能小车的外围电路的规划)做下位机的主从式体系。PC机操控小车的模仿框图如图1所示。运用单片机的串行口与PC机的串行口进行串行通讯,经过设置PC机的操控界面(智能小车运转的各种操控功用)来完成上位机的数据收集,并由上位机不断发送握手协议(通讯协议)信号,直到下位机回应“发送下一帧”中止。之后上位机开端发送正常数据。若下位机反应“发送下一帧”信息,则持续发送下一帧;若下位机反应“重发上一帧”,则重发刚刚发送过的那一帧数据;若下位机反应“无效地址”,则持续发送下一帧数据,然后完成PC机对长途前端单片机的操控。一起将单片机收集的数据经过判别握手协议(通讯协议)传送到PC中去,由PC(主)机一起依据从从机接纳的进程参数进行判别处理并给从机(单片机)发送各种操控指令。然后完成PC机(上位机)对智能小车外围电路(下位机)的操控。
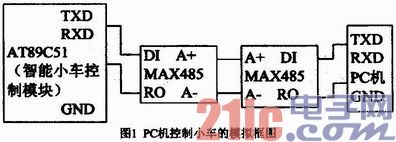
下位机规划选用AT89C51单片机芯片来完成智能车模型的主动寻迹、主动操控等功用,运用反射光耦(1550-01)检测是非线来完成;选用霍尔传感器(A04E)+磁钢来完成智能车行进的计程;一起选用四位共阴LED完成行进计程和时刻的替换计数显现。本文上位机规划选用在Visu al C++环境中,直接运用Windows供给的API函数完成一个串行通讯动态链接库(DLL),经过编程东西(VC)规划一个与智能小车通讯的上位机操控界面,在上位机和下位机之间经过MAX485接口芯片与操控软件结合来监测。MAX485是半双工的,能够先检测/RE和DE的电平,判别芯片是处于接纳信号仍是发送信号,然后再检测AB的电平,当A引脚的电平高于B端时,代表发送的数据为1;当A的电平低于B端时,代表发送的数据为0。然后完成上位机与下位机(由AT89C51单片机操控的智能小车)的半双工串行通讯。
2 体系的软件规划
单片机的通讯软件选用AT89C51的汇编言语编写,单片机的发送和接纳选用中止程序。预备发送的数据存放在以内存50H为首地址的接连10个单元中。本规划选用单片机芯片AT89C51为中心操控器,经过编写操控程序(汇编言语)来操控小车的正常行进、左右转弯、撤退行进、中止行进、检测金属、计程、行进时刻、告警和上位机与下位机的通讯等。
2.1 体系的下位机软件规划
2.1.1 操控主程序规划
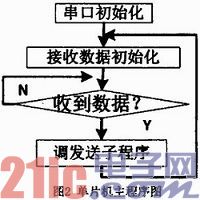
单片机主程序图如图2所示。操控主程序是经过中止服务程序完成的,选用外部中止0、外部中止1和T0中止来完成主程序的操控,使各中止子程序替换运转,显现不会发生搅扰,且能在显现部分替换进行显现。
2.1.2 小车行进程序规划
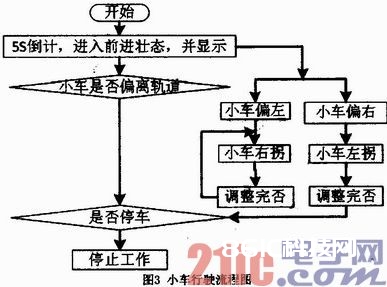
小车行进流程图如图3所示。小车行进操控程序发动后程序进入5S的倒计时状况,并敞开四位数码显现作业;5S倒计时完毕后程序开端运转黑带检测程序,由经过光电传感器(1550-01)检测到经过LM324扩大电路扩大的信号输入来判别小车是否正常行进,若否,则由相应的程序来操控小车的左转或右转来到达正常行进;当传感器检测到中止线时小车当即中止。
2.1.3 时刻计数程序规划
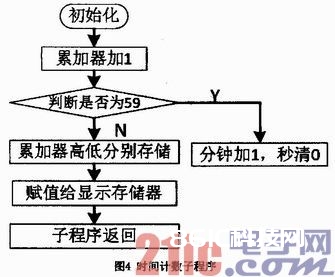
时刻计数子程序图如图4所示。小车行进的时刻长短需求经过时刻计数程序来操控。时刻计数程序经过累加器每秒钟计数一次来完成计数功用,并由十进制调整指令(DA A)来进行个位转换为十位的功用,一起特定的检测操控指令(CJNEA.#59H.JJX1)来判别是否达59S,若否,则进行高低位别离存储并送显现部分显现;若是,则分位加1秒位清0并送显现部分显现。
2.1.4 行进间隔记载程序规划
间隔中止子程序图如图5所示。小车行进间隔的记载经过霍尔传感器来检测小车车轮行进滚动的圈数,并经过中止服务子程序来进行换算成相应的十进制的(间隔)数据,再特别的换算操控指令:






