


1 导言
机器视觉是使用光电成像体系收集被控方针的图画,经计算机或专用的图画处理模块进行数字处理,依据图画的像素散布、亮度和色彩等信息,进行尺度、形状、色彩等的辨认。这样,就把计算机的快速性、可重复性,与人眼视觉的高度智能化和笼统才能相结合,大大提高了出产的柔性和自动化程度。
2 机器视觉空瓶检测体系
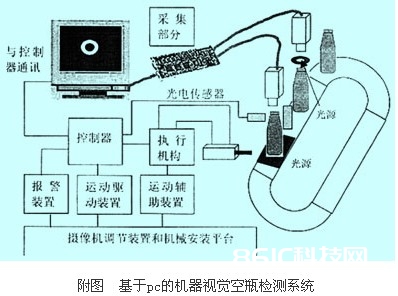
附图是依据pc的机器视觉体系在啤酒出产线上空瓶检测体系中的使用。该体系主要由相机、镜头、光源、图画收集卡、pc渠道和操控单元等六部分组成,各个部分之间相互配合,终究完成对酒瓶的质量检测和除掉。下面以附图为例,对各个组成部分的功用和选型进行介绍。
2.1 相机
在挑选相机时,主要有以下几个方面的问题要考虑:
(1) 相机的扫描方法:相机依照扫描方法能够分为面扫描和线扫描相机。
线扫描相机是指对物体进行行扫描的相机,线扫描相机又可分为隔行扫描和逐行扫描。线扫描相机适用于以下状况:对固定的物体做一维的丈量;方针物体处于运动状况;需处理可旋转圆柱体的边际图画;需求方针物体的高分辨率图画,而又要考虑价格要素等。线扫描相机的特点是运动平稳、速度盯梢精度高、光源强度要求高。现在,线扫描相机的分辨率现已到达几千线,检测速率也到达60桢/秒乃至更高。
面扫描相机一次只能拍照一副图画。因为面扫描相机的自身局限性,使其不适于动态方针接连无遗失的高精度检测。但是,针对其作业原理,选用以下技能:选用桢传送或行间传送ccd;选用高速快门(电子快门);选用单场技能;选用高频光源等,是完全能够进行动态图画的实时收集的,完全能够满意工业在线检测的要求。
(2)相机的色彩:工业相机按色彩能够分为是非和五颜六色相机。其间,是非相机比五颜六色相机的分辨率高,并且数据收集速度快。跟着相机制作技能的不断发展,现在,五颜六色相机也越来越多的得到了使用。这是因为曩昔的五颜六色相机体系要由三台相机组成,这三台相机别离对应r(赤色)、g(绿色)、b(蓝色)波长,而现在则呈现了单ccd五颜六色相机。五颜六色相机能够供给更强的调查和差异才能,因此在医学、生物学以及一些工业进程操控方面发挥了重要作用。
(3)相机的输出接口方法:相机输出接口方法有rs422、rs644、usb、ieee1394以及cameralink等,在挑选图画处理卡时应留意其是否支撑所选用相机的输出方法。
2.2 镜头
镜头的几个主要参数有:成像面,ccd感光片尺度,焦距,视界,物距,景深和视角挑选镜头时应考虑以下几个要素:
(1)镜头的成像面与所用的ccd相机是否匹配。成像面与镜头自身的规划及出产有关。成像应该是越大越好。但是有些厂家的镜头因为规划或出产上达不到技能要求,成像面会较小。
(2)确认镜头的焦距、物距和视界(这个主要是依据实践的作业或设备环境来确认)。这几个参数联系是:焦距越小,视角越大,最小物距越短,视界越大。以最常用的三种镜头(50mm,25mm,16mm)为例:50mm的镜头焦距是最大的,所以50mm镜头的视角就最小,而视界就最小,最小物距却是最远的;25mm的镜头焦距次之;16mm的镜头焦距则是最小的,所以16mm镜头的视角就最大,而视界也就最大,最小物距是最近的。
2.3 光源
光源是影响机器视觉体系输入的重要要素,因为它直接影响输入数据的质量和至少30%的使用作用。因为被检测物体的色彩、原料、折射率等特性的千差万别,就必须依据每个特定的使用实例,挑选相应的照明设备,以到达最佳的作用。光源按其照耀方法可分为背向照明、前向照明、结构光和频亮光照明等。背向照明是被测物放在光源和摄像机之间,其长处是能取得高对比度的图画;前向照明是光源和摄像机坐落被测物的同侧, 这种方法便于设备;结构光照明是将光栅或线光源等投射到被测物上,依据它们所发生的畸变, 解调出被测物的三维信息;频亮光照明是将高频率的光脉冲照耀到物体上, 照相机拍照要求与光源同步,这样能有效地拍照高速运动物体的图画。有卤素灯、荧光灯和led 光源等, 其主要功能的比较见附表。






