


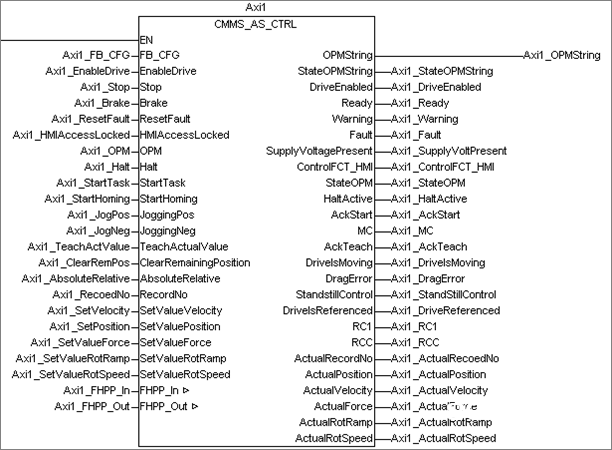
FHPP协议是根据CANopen协议开发的,供给了更全面的Motion操控功能块(见图三);
然而在实践使用中,当咱们选用了CMMD或许2个以上CMMS驱动器,按惯例计划架设好CANopen网络,在总线运转中就会发现:低位数据区(排在CAN网络前面)的那个伺服操控器上的CAN指示灯是平息的,可是马达操控器不报错,FHPP通讯却死活也激活不出来!
调查PLC程序,通常会发现1号轴功能块里的FHPP_In、FHPP_Out数据是反常的。这种情况下,选用惯例手法,例如:修正编写PLC程序、用FCT刷固件、用FCT康复出厂设置后新建再下载项目、优化外围电路与电能质量等等,哪怕是更换上新的操控器,都是没用的。怎么办?
镇定思索下,发现仍是FHPP协议的特殊性,使其CAN通讯参数也不能选用惯例设置,问题是设置哪些参数,设置为多少呢?有必要紧记以下这几张CODESYS中的CAN参数截图(见图一、图二),适用于简直一切选用FHPP协议通讯的场合!
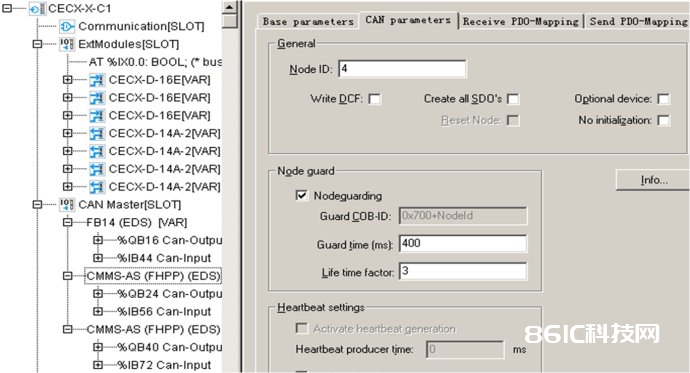
今后我会详解这些参数。






