


导言
跟着机器人技能和杂乱检测体系的呈现,人们对触觉传感器提出了更高的要求。跟着触觉阵列规划的扩展,期望A/D转化速度加速,而原先在小规划阵列触觉传感器体系中选用的共用A/D转化器的办法,已不能满意大规划阵列触觉传感器信号收集实时性的要求。因此,要想完结高速、高分辨率并且对小信号灵敏的大规划阵列触觉传感器信号收集体系,要害部件便是A/D转化器。
本文使用混沌帐子映射办法和开关电容(SC)技能,规划了一种新式A/D转化器。该A/D转化器的电路具有调度扩大、差错补偿和A/D转化功用一体化的长处,并且电路简略、便于集成、功耗小;能以很高的功能价格比完结多路触觉传感器输出信号的并行采样和A/D转化。
1 、阵列触觉传感器信号收集体系的组成
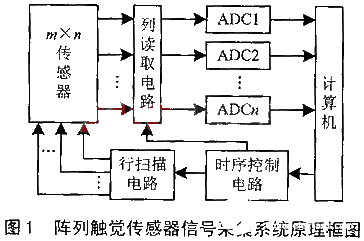
模仿式阵列触觉传感器信号收集体系的原理电路见图1。该体系由m%26;#215;n阵列传感器、列读取电路、行扫描电路、n个ADC电路、时序操控电路和计算机等组成。在时序操控电路的操控下,行扫描电路对m行阵列触觉传感器发送周期性鼓励信号;而列读取电路则周期性地并行读入n列输出信号。读n个信号经n个A/D转化器,把模仿信号转化成格雷码序列直接送到计算机;计算机完结格雷码向二进制码的转化,接着在时序逻辑的操控下,读取下一行的n列信号并进行A/D转化。计算机在取得1帧m%26;#215;n触觉传感器信号后,就能够进行信号处理了。图1中除A/D转化器需求特别规划外,其他各电路都有现有的产品,没有特别要求。
2 混沌开关电容A/D转化器的规划
2.1 混沌开关电容A/D转化的原理
使用开关电容技能进行差错补偿的基本原理是电荷的再分配。电容失配差错使用开关转化储存起来,成果由电容上电荷的再分配而得到补偿。混沌帐子映射是一种离散非线性体系,其映射联系为:

这一映射能够看到由两步组成:先将区间[0,1]伸长2倍,然后再压缩成原区间[0,1]。如此重复迭代操作,终究导致相邻点的指数别离,然后进入混沌状况。这种映射对初始值(体系的输入信号)的扩大与一般的线性扩大办法不同:线性扩大倍数为一常数,并且受作业范围约束;而处于混沌状况的帐子映射体系,是在有界的区间内,迭代1次将信号扩大2倍,重复有限次迭代后,能够将弱小信号扩大到可观测的水平,而不会呈现溢出再现象。明显,这是一种非线性扩大。帐子映射体系的输入值Vin对应于体系的初始状况x0。x0能够二进制小数表明:
为了得到离散帐子映射的迭代输出与x0的联系,引进另一种非线性映射——离散贝努利移位是映射:

这一映射的效果是每迭代一次,就将二进制位t1、t2、t3、……向左顺次移出一个二进制位,即
关于贝努利移位映射,令bn=sgn(x“n-0.5),作为贝努利移位映射的第n次迭代输出,因为bn=tn,且bi(i=0,1,2,…)是一个二进制序列;关于帐子映射,令gn=sgn(xn-0.5),则gi是与bi对应的格雷码序列,即![]()
依据上述和初始时刻x0=x”0=Vi,可得:

因此,经过将帐子映射迭代输出的格雷码序列gi(i=0,1,2,…),转化成贝努利移位映射的二进制序列bi(i=0,1,2,…),可推算出初始值(输入信号的二进制数字量),即
式(7)中{Vin}表明输入信号的二进制数字量。gi(i=0,1,2,…)便是经过帐子映射完结了对输入信号的非线性扩大和A/D转化的格雷码方式的数字量。
2.2 混沌开关电容A/D转化电路的完结
使用并关电容技能进行电路规划,有其共同的长处:电路的功能与电容无关,只取决于电容之比,两个电容比值的差错小于1/1000,因此电路运算精度高;电路便于完结大规划集成,因此电容体积小、作业牢靠、成本低,功耗小(一个开关电容A/D转化器功耗4mW)等。这些长处对模仿式阵列触觉传感器信号收集体系最有利,因此该体系需求很多的ADC。
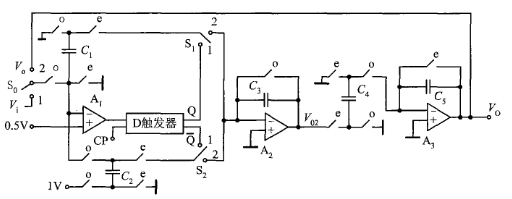
图2 混沌开关电容A/D转化电路
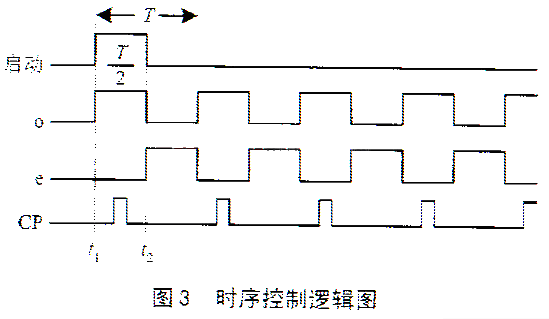
根据帐子映射的开关电容A/D转化电路如图2所示。运放A1、A2及周围的电路完结帐子映射,即完结对输入信号的非线性扩大和A/D转化;C4、C5、A3及周围的电子模仿开关组成坚持电路,输出信号V0为输入信号的格雷码方式的数字量。图3为电路时序操控逻辑。
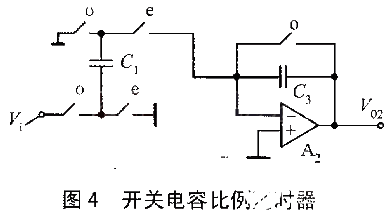
图2电路,当发动信号为高电平时,电子模仿开关指向“1”端,输入信号Vi接通。延时t1时刻后,D触发器发生一个脉冲信号,这时,若0≤Vi≤0.5,则电子模仿开关S1指向“2”端,C1、C3和A2及有关的电子模仿开关构成一个开关电容份额延时器,如图4所示。在(n-1)T时,Vi给C1充电,充电电荷为C1Vi(n-1),C3被短路,V02(n-1)=0;在nT时,C1中电荷转移到C3中,充电电荷为C3V02(n),由电荷守恒原理,其差分方程为:
C1Vi(n-1)=C3[V02(n)-V02(n-1)]=C3V02(n) (8)
式(8)经过Z改换可得该电路Z域传递函数: H(Z)=V02(Z)/Vi(Z)=(C1/C3)Z -1 (9)
若取C3=0.5C1,则有: H(Z)=V02(Z)/Vi(Z)=(C1/C3)/Z -1=(C1/0.5C1)Z -1=2Z -1 (10)
可见,图4的电路具有起扩大效果的份额延时功用,完结了对输入信号的翻倍,即完结了y=2x的运算;一起对C4充电,当下一个“o”脉冲为高电平时,C4中电荷转移到C5中,这时开关S0指向“2”端,把输出信号Vo反应到输入端,给C1充电,完结迭代运算。经过n次迭代后,使Vi信号入大,直到可观测停止。
同理,当0.5≤Vi≤1时,Vi向C2充电,电子模仿开关S2指向“2”端,这时,C2、C3和A2构成另一个开关电容份额延时器,把式(9)中的C1换成C2,便是这个份额延时器的Z域传递函数。“e”脉冲为高电平时,C2中电荷Q=C2Vi转化到C3中,若取C3=0.5C2,就完结了y=2(1-x)的运算;当下一个“o”脉冲为高电平时,C4中电荷转移到C5中,这时开关S0指向“2”端,把输出信号Vo反应到输入端,给C2充电,完结迭代运算。经过n次迭代后,使Vi信号扩大到可观测停止。
这样,经过一个周期T,完结了对Vi一个样点的收集。如此循环往复地进行A/D转化作业。D触发器输出的信号便是格雷码序列:
将gk序列和初始条件b0=Q0代入式(6)中,就得到贝努利二进制序列bk(k=0,1,2,…)。当然,只要把ADC的输出信号Vo(格雷码序列)送入计算机,转化成二进制数字量的作业,可由计算机经过软件来完结。
3 、试验成果
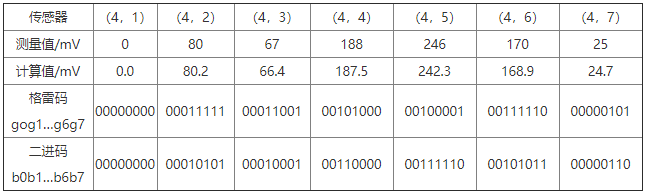
使用图4的信号体系对5%26;#215;7应变式微型阵列传感器输出的信号进行非线性扩大和A/D转化试验,试验成果见表1。表1中为第4行7个传感器输出信号进行A/D转化的成果。试验成果表明,根据帐子映射的开关电容A/D转化器可有效地完结对小信号的扩大和A/D转化。
4 、定论
本文使用混沌电路对小信号灵敏及它具有的非线性改换的共同功能,规划了混沌帐子映射开关电容新式A/D转化器。这种A/D转化器适用于机器人模仿阵列触觉传感器输出信号的A/D转化。它集调度扩大和A/D转化于一体,具有电路简略、易于集成及功耗小的特色。开关电容电路只要二相时钟,电路功能只取决于两个电容之比而与电容绝对值无关,因此电路运算精度高、成本低。使用该A/D转化器可完结多路触觉信号的并行采样和A/D转化,以满意大规划阵列传感器信号的实时收集要求。试验成果证明了本办法的有效性。
表1 A/D转化试验成果
责任编辑:gt






