


关于安全具有要害性的运用来说,因为中止和相关的服务例程而导致缺少确定性,因而运用微型操控器来完成马达操控的作用并不令人满意。
此外,根据微操控器的施行计划无法处理超越一个马达,严峻约束了其到达高性能 (在取样时刻小于10μs和开关频率高于100kHz下到达数万RPM) 的才能。图1总结了如今运用微操控器的马达操控工程师所面临的大多数应战,以及SmartFusion2 SoC FPGAs-based解决计划为规划工程师带来的价值。

运用美高森美SmartFusion2 SoC FPGA,用户能够挑选各种代替计划:
1. 具有严厉中止屏蔽操控的纯软件解决计划
2. 分区的硬件和软件解决计划,硬件用于处理马达操控算法的要害部分
3. 保证更快的速度和确定性施行的纯硬件解决计划
所有这些选项都是可调理的,用于操控单一或多个 (最多六个) 马达,在极小密度和小占位面积器材中选用多种算法。如今能够运用的算法包含:PMSM/ BLDC的无传感器FOC、运用霍尔的FOC、运用编码器的FOC、用于感应马达的VFD。
关于纯硬件施行计划,用户可通过Libero SoC取得完好的IP模块组合,包括Clarke和Inverse Clarke、Park和Inverse Park以及先进的PI操控器。此外,也供给转子方位GUI操控,用于马达装备以到达单一马达30KRPM,或许装备六个马达,运用时分多路复用算法在单一设备中并行运转。该GUI还能够显现来自FPGA器材的实时信号,这关于调试对错常有用的。
总括而言,美高森美坚固耐用的SoC SmartFusion2和Igloo2 FPGA器材具有较大的密度,答应规划人员在ASSP、CPLD或其它分立器材中结合马达操控施行计划和附加功用。这种高集成度进一步节省了BoM本钱、减小了电路板空间、提升了体系的整体可靠性,而且简化了收购进程。
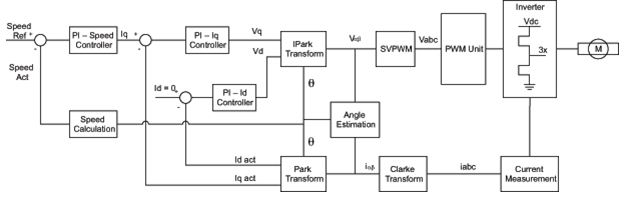
图中文字:速度参阅、PI-速度操控器、PI-Iq操控器、IPark改变、SVPWM、PWM单元、逆变器Vdc、速度动作、速度核算、PI-Id操控器、视点估量、Park改变、Clarke改变、电流丈量






