


关于工业机器人的规划与大多数机械规划进程相同;首要要知道为什么要规划机器人?机器人能完结哪些功用?活动空间(有用作业规模)有多大?了解根本的要求后,接下来的作业就好作了。

首要是依据根本要求承认机器人的品种,是行走的进步(举升)机械臂、仍是三轴的坐标机器人、仍是六轴的机器人等。选定了机器人的品种也就承认了操控办法,也就有了在有限的空间内进行规划的辅导方向。
接下来的要做的便是规划使命的承认。这是一个相对杂乱的进程,在完结这一杂乱进程的第一步是将规划要求清晰的规则下来;第二步是依照规划要求制造机械传动简图,剖析简图,拟定动作流程表(图),开端承认传动功率、操控流程和办法;第三步是清晰规划内容,规划进程、霸占点、规划核算书、草图制造,资料、加工工艺、操控程序、电路图制造;第四步是归纳审阅各方面的内容,承认出产。
下面我将以六轴工业机器人作为规划目标来说明这一规划进程:
在介绍机器人规划之前我先说一下机器人的使用范畴。机器人的使用范畴能够说是十分广泛的,在主动化出产线上的就有许多比如,如垛码机器人、包装机器人、转线机器人;在焊接方面也有很比如,如轿车出产线上的焊接机器人等等;现在机器人的开展是十分的敏捷,机器人的使用也在民用企业的各个职业得以延伸。机器人的规划人才需求也越来越大。

六轴机器人的使用范筹不同,规划办法也各不相同。现在世界上出产机器人的公司也许多,结构各有特色。在我国使用最多的如:ABB、Panasonic、FANUK、莫托曼等国外进口的机器人。
已然机器人的使用那么广泛,在我国却没有闻名的出产公司。关于作为我国机械工程技能人员来说是一个值得考虑的问题!有关机器人技能方面讨论太少了?从业人员还不能成集体?尽管在许多当地能够看到机器的论术,可是却没有真实构成遍及的东西。
即然是要说规划,那我就从头一点一点的说起。力求讲的浅显简明一些,讲得不对的当地还请各位纠正!
六轴机器人是多关节、多自由度的机器人,动作多,改变灵敏;是一种柔性技能较高的工业机器人,使用面也最广泛。那么怎样去从头开端的规划它呢?作业规模又怎样去承认?动作怎样去编列呢?位姿怎样去操控呢?各部位的关节又是有怎么样的要求呢?等等。。。。。。让咱们带着很多的疑问渐渐的往下走吧!
首要咱们设定:机器人是六轴多自由度的机器人,手爪夹持二氧气体维护焊规范焊枪;完结点焊、接连焊等不同要求的焊接部件,工艺要求、工艺道路改变快的主动生线上。最大伸长量:1700mm;滚动270度;底座与地平线水平固定;全电机驱动。
好了,有了这样的根本要求咱们就能够做开端的计划的考虑了。
首要是全电机驱动的,那么咱们在考虑计划的时分就不要去考虑液压和气压的各种结构了,也便是传动组织只能用齿轮齿条、连杆组织等机械组织了。
机器人是用于焊接方面的,那么咱们就去调查有人工行为下的各种焊接办法和办法。这儿就有一个很杂乱的东西在里边,那便是焊接工艺;即然焊艺定不下来,咱们就给它区别一下,在常用焊接里有单点点焊、接连断点点焊、接连平缝焊接、填角焊接、立缝焊接、仰焊、环缝焊等等。。。。。。
搞清了各种焊办法,也就了解了要完结这些杂乱的动作就要有一套可行的操控办法才行;在机械没有彻底规划出来之前能够不做太多的操控计划考虑,有一个大约的概括概念就行了,待机械结构做完,各方面的驱动功率承认下来之后再做具体的程序。
焊枪是用常用的规范的焊枪,也便是说焊枪是随时能够替换下来的,也就要求咱们要做到对焊枪的夹持部分进行快速确认与松开。
焊枪在焊接进程中要进行各种焊接姿势调整,那么机械手腕就要很灵敏,在各个方位角度上都可调理。
有了上面的根本要求和设定条件,计划推理也有了条理,接下来咱们就把规划要求清晰下来,规划方向就不会有太大的偏离了。
规划使命
规划要求:机器人适用于焊接范畴,能够完结各种焊接动作;为了机器人能习惯各种焊接工艺,在线调整工艺快速,编制操控程序时选用柔性操控程序,自习惯在线、离线示教程序;焊缝、焊池、焊道成像盯梢,主动调理焊机的各项参数。
机器人选用全伺服驱动,地上固定装置。六轴操控,各关节运动灵敏,按工艺描绘表规划各轴动作规模,尽量使组织紧凑,全体外形漂亮。
规划内容
机械规划:依据规划要求及工艺描绘规划各关节的机械组织,承认各部件的资料和加工工艺;制造核算书,验算机械强度、驱动功率和给出最大抓(举)分量,各运动途径的惯量核算,位姿的操控核算。验算机器人各要害部件使用寿命。结合操控程序及电路制造机器人维修保养说明书。
程序操控规划:依据规划要求与机械工程师最终拟定的工艺道路规划操控流程;结合机械结构与驱动、信号反应办法,规划机器人运动程序;程序要具有自习惯功用,主动定点盯梢,对焊机电流、电压实时监测,并主动调理;焊道、焊池用成像监测判别技能。
规划电路图
有了这样一个文件,咱们就好规划了;那么咱们首要就要做的是:制造机器人动运简图,规划机器人运动轨道,做好这些咱们就能够进行机械组织的规划,一起能够考虑程序的线路图了。
先做一个简图,来研究一下运动规迹。
机器人运动简图:
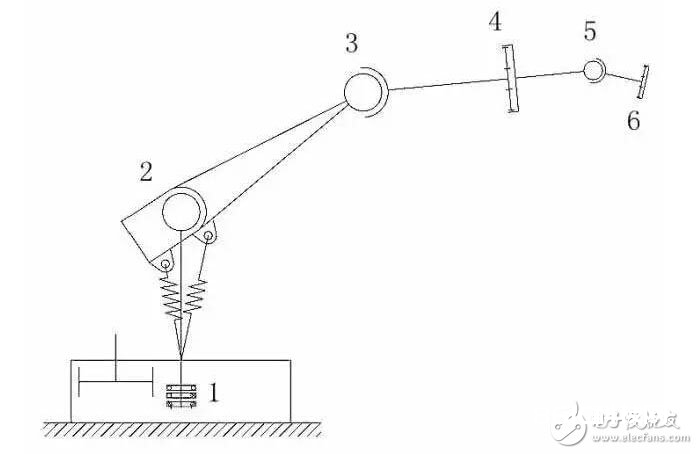
当咱们把机械运动简图画好后,一般的情况下是先对简图进行剖析;尽管简图不能悉数反映机械结构的组成,可是它却体现出了要规划的物体的整体概括。
那么关于咱们这个机器人的简图,咱们从哪里着手剖析才合理呢?
首要,咱们看一下规划使命书的内容。从使命书中知道,六个轴中有三个轴是做旋转运动的,其他作摆角运动。
结合使命书,咱们看一下简图,是不是第1轴、第4轴和第六轴是做滚动的,也便是说咱们要检查一下咱们所画的简图是不是与使命书中的要求相契合,契合了也就代表咱们的规划思路与要求(客户要求)相同,能够进行下一步作业,假如不同,就得从头画简图。
从简图知道,机器人的手臂弹性规模较大;假如把手臂悉数伸直,并且咱们假定地把它们当作同一钢体,这样就构成一端固定的悬臂梁。
使用力学常识系统中的有关梁的剖析咱们知道,要搞清悬臂梁的变形量,首要要知道梁的分量和截面惯量。
由简图知道,因为有多个关节衔接,要知道截面形状和惯量不太简单,只要把一切的组织都规划完结后才会知道想求的参数。
由简图看出,第二轴担负着手臂的上下运动,并且手臂又比较长,在运动的进程中必定存在着惯性冲量,也便是说,当大臂的运动速度很慢时,惯性就很小;假如速度加速,惯性就加大,这个惯性冲量是与速度有着线性联系;怎样坚持必定的速度,又不让惯性跟着改变呢?咱们都知道,添加阻尼,可有用消除这种联系。这样,咱们就能够了解简图上两个绷簧的意图了。
即然是这样,那咱们就从手腕开端规划。也说是咱们所说的从上到下的规划办法。
规划手腕要考虑哪些问题呢?能够知道的是有一把焊枪,焊枪的分量不是很重,一起要有夹持焊枪的手爪。也便是说手腕在滚动时的负载是不大的,挑选驱动功率不大的元件就行了。
要让手腕在360度规模内滚动,并且后边紧跟着又有一个上下摇摆的关节;手腕又是在机器人手臂的最前端,当然整体质量不能太重。用什么样的组织最好呢?下面咱们考虑几个计划:
1.如简图所示,选用行星齿轮传动。电机驱动太阳轮,行星轮绕太阳轮滚动,内齿轮经行星轮减速与太阳轮反向运动,电机与太阳轮同轴装置。
2.多级齿轮减速传,电机装置于手腕一侧。
3.摆线针轮减速传动,电机与偏心轴同轴装置。
4.蜗轮蜗杆减速传动,电机有两种装置办法;一种与输出轴成90度装置,另一种与输出轴同轴线反向错位装置。
如上所述,还有许多种办法办法,究竟选哪一种最好呢?这样咱们就要做比较了。从上面的计划里看,第2种办法是不可的;第4种办法假如选用,手腕的结构就会很大,不利于机器人在运动时做精细定位。这样咱们去除了两种办法,咱们再比较一下第1种和第3种办法;
行星齿轮传动,传动比大,结构杂乱,齿轮副合作有空隙,不能自锁。假如选用就得进步齿轮精度,因为是精细传动,齿轮资料也不能按惯例齿轮选用资料,加工工艺相对惯例齿轮相杂乱的多。
摆线针轮传动,传动比大,结构杂乱,传动空隙小,能够自锁。假如选用,手腕的尺度不会太小,并且零件加工困难,精度不易确保。
比较各方面后,决议选用行星齿轮传动机械结构。行星齿轮在传动的进程中有装置空隙和机械磨损所形成的空隙;要消除这些机械空隙首要就要让齿轮副的合作空隙要小,齿轮资料经热处理后外表要耐磨,因而行星齿轮副的规划核算不能按惯例行星齿轮的规划办法去核算。机器人的手腕是很灵敏的关节,并且是要做正反两个方向的反转。怎么样装置电机是一个问题;行星齿轮传动组织与手腕俯仰关节衔接是一个问题。
还有,手腕的运动速或许对错等速的;怎么样去操控电机?又怎么样去收集反应信号?宣布的操控信号到履行单元的进程中有没外部搅扰?它来自哪里?
再有,便是手腕在运动进程中的精度;手腕在空间做相对运动,怎样去完结运动精度?影响运动精度的要素有哪些?
在规划手腕这前必定要搞清楚影响手腕的各方面的要素及内容,问题得到回答后再真实开端手腕的规划。
下面给出伺服电机的的技能参数:
类型:MSMD04ZS1V
额外输出功率:400W
额外转矩:1.3N.m最大转矩:3.8N.m
额外转速/最高转速:3000/5000rpm
电机惯量(有制动器):1.7×10-4Kg.m2
变压器容量:0.9KVA
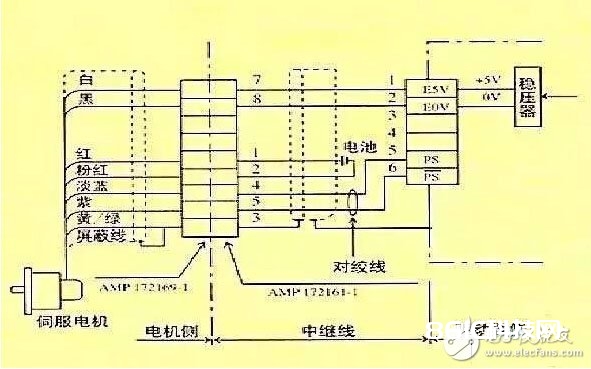
编码器:17位(分辨率:131072).7线制增量式/肯定式。
适配驱动器类型:MBDDT2210
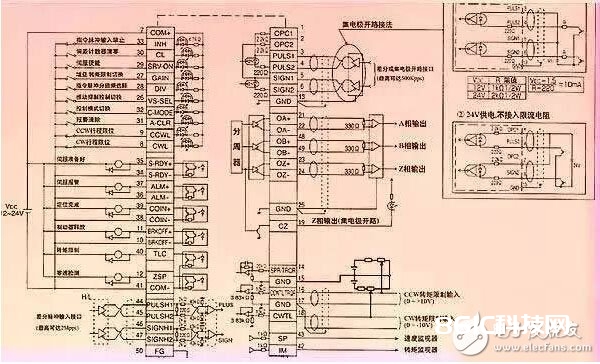
方位操控接线图:
17位增量式/肯定式编码器接线图:
即然咱们选用了行星齿轮传动,那么咱们就要进行行星齿轮的相关核算。
首要选定模数,因为机器人手腕部分结构要求尽量的小,输出的转矩也相应不是很大,可是,它却会在正反两个方向上存在着高速换向的或许,也便是说在换向时齿轮要战胜很大的惯性力,因而,模数的挑选核算要按输出转矩的数倍来核算,也便是说:在按强度核算模数时,安全系数选大些。一起因为结构的约束,尽量选用小模数。有关齿轮的核算公式咱们能够查阅《齿轮规划手册》。这儿我选用模数为:1m选定了模数,下面就要核算传动比,有关行星齿轮传动的核算咱们可查阅《齿轮规划手册》或《机械规划手册》内的《齿轮传动部分》,里边有具体的介绍和核算典范。在此不作介绍和引证。
行星齿轮传动,必定有一个结构是起浮的,在机器人手腕部分是不是也适用呢?哪一部分做输了出?哪一部分起浮?
首要,机器人手腕做360度滚动,结构又比较小,再者便是它的输出部分是要有一个法兰,用来装置夹持履行部件的。
假如让行星架起浮,行星齿轮散布在太阳轮圆周上,让它起浮时,在运转进程中它不是绕定轴滚动,也便是说它不满意输出法兰的滚动条件。
现在咱们考虑一下让内齿滚动,法兰固定在内齿轮上,这样就能够确保法兰的滚动条件。
下面给出手腕的结构图,无起浮部件,内齿轮滚动。







