


安稳渠道能够有用的阻隔载体运动,确保设备于安稳渠道上的设备作业时不会受载体的运动影响。不管在军事上仍是在民用中安稳渠道都有着重要的用处。本文的首要研讨目标归于实时安稳渠道。实时安稳渠道的载体处于运动状况,要求负载如舰载兵器等在载体运动的状况下牢靠安稳地作业,多见于高技术含量的兵器体系如舰载设备、机载设备等,实时安稳渠道关于安稳渠道的快速性及动态精度要求较高,手动或滞后调平现已不能满足要求。
1 体系组成
1.1 调平原理
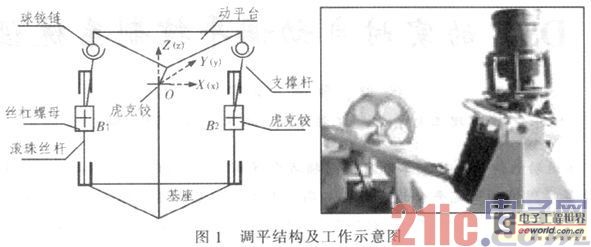
调平体系的结构原理示意图如图1所示,首要由动渠道,三自由度球铰链,支撑杆,二自由度虎克铰,丝杆螺母和滚珠丝杆,基座等部件构成。动渠道通过支点A1,A2及O点别离与渠道的基座和传动支链相衔接,并构成以O点为直角的等腰直角三角形A1A2O。体系作业时,当检测到动渠道处于非水平状况后,操控体系通过解算得出两球铰应上升或下降的行程,然后驱动电机经传动组织(减速箱)操控丝杆滚动带动丝杆螺母上移或下移,继而支撑杆带动球铰操控动渠道进行安稳调平运动。体系调试时由一个电机通过带轮驱动曲柄摇杆组织带动体系进行摇晃动作,操控体系操控电机进行实时调平。
1.2 操控体系硬件构成
体系由倾角检测部分,操控部分,通讯部分,履行部分,限位维护部分,状况显现部分组成,首要包含TMS320F2812芯片,升降压电路,485串口通讯模块,视点陀螺仪,角速度陀螺仪,电机驱动器,限位开关,状况显现模块等。体系硬件作业原理如图2所示。
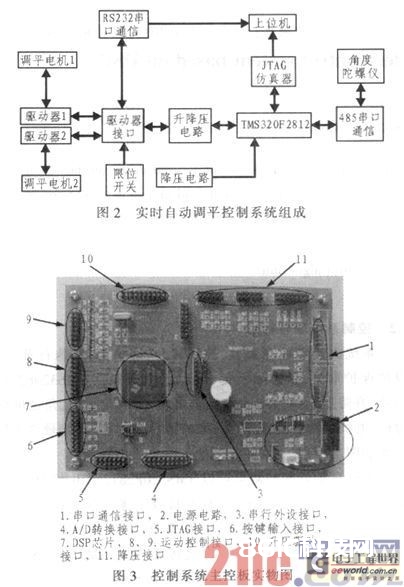
实时主动调平操控体系以TMS320F2812芯片为中心,通过485串口通讯操控陀螺仪并接纳陀螺仪视点数据,通过滤波处理,得到体系摇晃角速度与倾角状况,通过TMS320F2812芯片核算得出电机转速,再由TMS320F2812的两路脉冲信号通过升压电路别离发送给两台电机驱动器驱动电机进行调平。驱动器可通过降压电路把电机实践准确方位信息反应给操控体系。限位开关可确保不会产生超量程动作导致机械结构损坏的现象。上位机可通过JTAG仿真器与操控体系衔接,完成调试实验程序、下载等功用,也可通过RS232串口与驱动器衔接,便利监测电机体系状况。状况显现可观测到体系调平状况及有无过错产生。
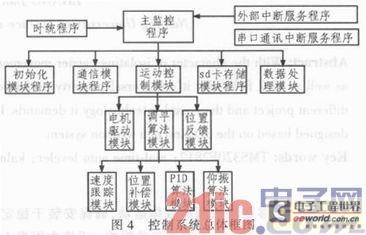
操控体系主控板如图3所示。该操控板的首要功用模块电路与硬件规划章节所述根本共同。操控板以TMS320F2812为中心,其集成的通讯模块与电机操控模块十分合适本体系功用的完成。除此之外还通过通用I/O口规划了电机、传感器等接口电路以及按键使用,在操控板反面还规划了SD卡模块。
2 实时调平操控计划
2.1 实时调平操控体系软件整体框图规划
操控体系软件选用C言语编写,选用模块化规划,便于调试。操控体系软件包含主监控程序、初始化模块程序、运动操控模块程序、数据处理模块程序、SD卡存储模块程序、通讯模块程序等组成,其间运动操控模块又分为:电机驱动模块、调平算法模块、方位反应模块等。操控体系软件整体框图如图4所示。
2.2 实时调平操控算法程序规划
调平算法模块包含3个部分:速度盯梢与方位补偿模块、PID算法模块。其间速度盯梢模块使调平组织在体系摇晃时能够以相同的速度反向运动以完成调平粗调;方位补偿模块能够使得调平体系减小静态差错,在动态调平过程中减小动态差错堆集;PID算法完成了电机运动状况跟着体系摇晃速度而实时变速的功用;抑振模块改进了体系的动态功能,使得调平快速呼应功能以及动态精度进一步进步。
1)速度盯梢与方位补偿模块程序
速度盯梢模块及方位补偿模块程序流程图如图5~6所示。
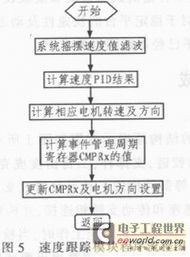
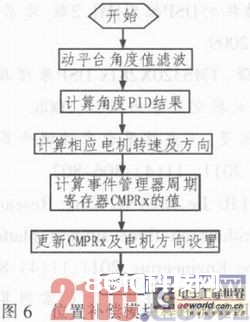
当操控体系采样速度通过滤波,并核算出速度PID成果后,根据传动链传动等到丝杆螺母速度与动渠道角速度之间的联系便可得到电机转速。由电机转速便可核算出事情管理器周期寄存器设置值,最终更新周期寄存器的值便可改动电机转速。电机转速与周期寄存器设定值之间的联系如下。






