


摘要 介绍了一种根据双核DSP Blackfin561的嵌入式车牌辨认体系。评论了体系的硬件结构和软件完结流程,以及根据Hpofield神经网络进行车牌辨认的办法及进程。首要对视频图画进行解码,以获取图画的亮度信号;然后经过图画处理办法对图画进行调整、定位、切割等处理;终究运用Hopfield神经网络辨认出车牌上的字符信息。
跟着科技与经济的开展,轿车数量也逐步增多,交通办理问题日渐严峻。怎么树立一个科学有用的交通办理体系是交通办理的要点。智能交通体系(TTS)跟着科技的鼓起,是未来交通办理开展的必然趋势,也是电子信息技能的一个前沿课题。车牌辨认体系(License Plate Recognition System,LPRS)是智能交通体系的重要组成部分,在自动化办理、信息核算、车辆盯梢等方面均具有重要意义。尽管国外在LPRS上已取得了较好的作用,而国内因起步较晚,现在仍需要对很多的相关技能进行深化的研讨与完结。
根据Blackfin561的LPRS代替了人工辨认车牌的人物,这可节约很多人力物力。本文评论的LPRS可用于高速收费站口及小区门口,以完结车流量核算和车辆盯梢等功用。
1 体系的总体设计与架构
嵌入式车牌辨认体系是一个能够完结车牌辨认与信息处理的独立体系,整个体系包含视频收集模块,图画处理模块与通讯模块。体系的软件设计包含路途图画的收集、图画预处理、车牌定位、字符切割,字符辨认和成果发送6大部分。
1.1 根据DSP的嵌入式车牌辨认体系
因为DSP强壮的数据处理才能,使得它在嵌入式图画处理范畴占有了重要方位,尤其是双核DSP,更是在视频处理使用中上升气势迅猛。根据DSP的嵌入式车牌辨认体系一般选用主机与DSP分布式处理结构,其长处是价格低、可靠性好、便于晋级。体系的一般结构首要分图画收集、DSP处理和PC机数据办理3部分,其体系结构如图1所示。
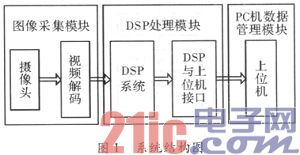
图画收集模块包含视频的输入部分与图画的提取部分,其功用是经过CCD摄像头收集亮度信号,输出模仿的复合视频电信号,并经过视频解码芯片解码出所需的数字图画信号。DSP处理模块首要由DSP处理器及其外围电路,外部存储器以及与主机的接口电路组成。其间外部存储器用来存储图画的很多数据,供DSP处理器调用。与主机的通讯接口常用的有UART、PCI、USB和以太网等。因为体系一般要考虑其本身的扩展性、终端与主机的远距离通讯、布线的难易程度等要素,故以太网使用较为遍及,但缺陷就是在无集成以太网功用的DSP上,需外加芯片,进步了体系的本钱。PC机数据办理模块因体系使用的意图不同而异,首要包含人机交互界面和数据库与相应的处理机制。
1.2 体系硬件构架
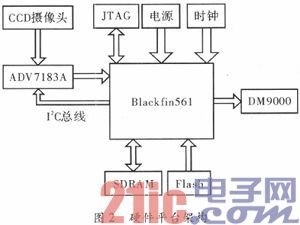
根据Blanckfin561的车牌辨认硬件渠道架构如图2所示,首要包含ADI公司的Blackfin561处理器,ADV7183A视频解码芯片、Flash、SDR AM以及DM9000。Blackfin561经过I2C总线对ADV7183A进行复位及初始化与作业形式的装备。视频信号由Blackfin561的并行外部接口(PPI)收集,并存储到外部SDRAM,Blackfin561对图画数据进行核算,输出的辨认成果经过DM9000传输到上位机进行后续处理。
1.3 体系软件设计
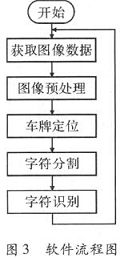
车牌辨认体系的软件流程如图3所示,首要包含图画收集、图画预处理、车牌定位、字符切割和与上位机通讯等模块。
1.3.1 图画收集
体系加电后,DSP经过I2C总线对ADV7183A的寄存器进行装备,对摄像头收集到的模仿视频信号进行解码,输出YCrCb为4:2:2格局的数字视频信号。因为算法只处理亮度信号,故经过二维DMA采纳距离2 Byte采1Byte的办法,只提取Y通道的亮度信号存入到SDRAM中,一起在SDRAM中选用乒乓存储机制存储接连的两帧图画,使体系能够到达实时处理的要求。
1.3.2 图画预处理
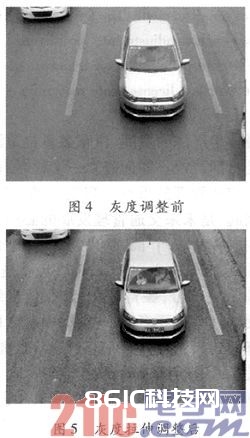
因为收集到的图画会因为气候、车牌整齐度和光线等要素形成图画被噪声污染,导致图画质量下降,这会给后续的辨认作业带来费事。因而,需对收集到的原始图画进行必要的预处理,以进步图画的信噪比,并使灰度值和比照度到达抱负状况。因为去噪点的算法会不同程度地使图画边际变含糊,不利于后续车牌的定位,故将去噪作业放到车牌定位之后。这儿预处理首要是经过直方图均衡法调整图画的灰度规模与比照度,到达图画增强的意图。处理前后的比照作用如图4和图5所示。
1.3.3 车牌定位
根据路途与摄像头的相对方位,车速规模以及路途宽度信息等,可预先断定车牌在摄像头坐标系中呈现的规模,这便能够大幅减小运算量。在预订车牌检测区域内,经过大率法对图画进行二值化,然后进行形态学运算中的开运算与闭运算,得到如图6所示的图画。对图画进行竖直投影,寻觅白色像素点最多的一行,之后以这一行为中心向两头寻觅鸿沟,找出车牌的上下边。对纵坐标在上下边规模内的图画进行水平投影,寻觅接连的白色区域,以确认左右鸿沟。两次寻觅鸿沟时均要结合车牌巨细的先验尺度常识来确认车牌的区域,若不契合尺度要求则扫除此次找出的区域并从头寻觅。
1.3.4 字符切割
根据车牌的鸿沟信息提取出车牌区域的原始亮度数据,对车牌区域再用大率法进行二值化。这样可消除图画其他部分对车牌灰度规模的影响。然后对二值化后的图画进行水平投影,根据车牌字符的宽度来对车牌字符进行切割。再对每个切割出的字符进行竖直投影,并根据车牌字符高度尺度来去掉上下的黑边,得到待辨认的字符图画,如图7所示。






